
多旋翼无人机的结构和原理
翼型的升力:
本文引用地址:http://www.amcfsurvey.com/article/201710/368117.htm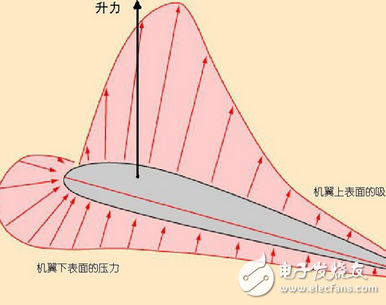
升力的来龙去脉这是空气动力学中的知识,研究的内容十分广泛,本文只关注通识理论,阐述对翼型升力和旋翼升力的原理。
根据流体力学的基本原理,流动慢的大气压强较大,而流动快的大气压强较小。由于机翼一般是不对称的,上表面比较凸,而下表面比较平(翼型),流过机翼上表面的气流就类似于较窄地方的流水,流速较快,而流过机翼下表面的气流正好相反,类似于较宽地方的流水,流速较上表面的气流慢。大气施加与机翼下表面的压力(方向向上)比施加于机翼上表面的压力(方向向下)大,二者的压力差便形成了升力。[摘自升力是怎样产生的]。
所以对于通常所说的飞机,都是需要助跑,当飞机的速度达到一定大小时,飞机两翼所产生的升力才能抵消重力,从而实现飞行。
旋翼的升力飞机,直升机和旋翼机三种起飞原理是不同的。飞机依靠助跑来提供速度以达到足够的升力,而直升机依靠旋翼的控制旋转在不进行助跑的条件下实现垂直升降,直升机的旋转是动力系统提供的,而旋翼旋转会产生向上的升力和空气给旋翼的反作用力矩,在设计中需要提供平衡旋翼反作用扭矩的方法,通常有单旋翼加尾桨式(尾桨通常是垂直安装)、双旋翼纵列式(旋转方向相反以抵消反作用扭矩)等;而旋翼机则介于飞机和直升机之间,旋翼机的旋翼不与动力系统相连,由飞行过程中的前方气流吹动旋翼旋转产生升力(像大风车一样),即旋翼为自转式,传递到机身上的扭矩很小,无需专门抵消。

而待设计的四旋翼飞行器实质上是属于直升机的范畴,需要由动力系统提供四个旋翼的旋转动力,同时旋翼旋转产生的扭矩需要进行抵消,因此本着结构简单控制方便,选择类似双旋翼纵列式加横列式的直升机模型,两个旋翼旋转方向与另外两个旋翼旋转方向必须相反以抵消陀螺效应和空机动力扭矩。
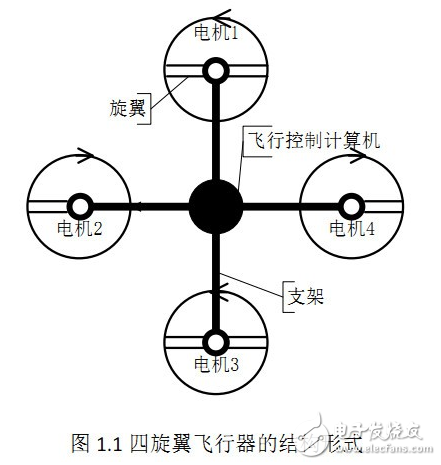
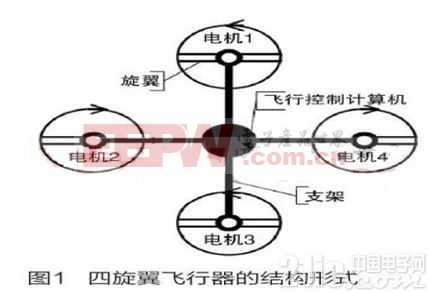
1.结构形式
旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。结构形式如图 1.1所示。
2.工作原理
四旋翼飞行器通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。四旋翼飞行器是一种六自由度的垂直升降机,但只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
四旋翼飞行器的电机 1和电机 3逆时针旋转的同时,电机 2和电机 4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
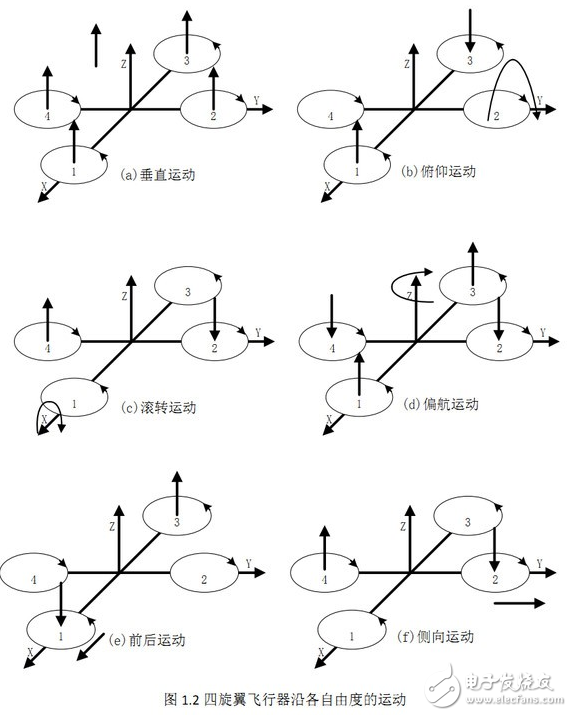
在上图中,电机 1和电机 3作逆时针旋转,电机 2和电机 4作顺时针旋转,规定沿 x轴正方向运动称为向前运动,箭头在旋翼的运动平面上方表示此电机转速提高,在下方表示此电机转速下降。
(1)垂直运动:同时增加四个电机的输出功率,旋翼转速增加使得总的拉力增大,当总拉力足以克服整机的重量时,四旋翼飞行器便离地垂直上升;反之,同时减小四个电机的输出功率,四旋翼飞行器则垂直下降,直至平衡落地,实现了沿 z轴的垂直运动。当外界扰动量为零时,在旋翼产生的升力等于飞行器的自重时,飞行器便保持悬停状态。
(2)俯仰运动:在图(b)中,电机 1的转速上升,电机 3 的转速下降(改变量大小应相等),电机 2、电机 4 的转速保持不变。由于旋翼1 的升力上升,旋翼 3 的升力下降,产生的不平衡力矩使机身绕 y 轴旋转,同理,当电机 1 的转速下降,电机 3的转速上升,机身便绕y轴向另一个方向旋转,实现飞行器的俯仰运动。
(3)滚转运动:与图 b 的原理相同,在图 c 中,改变电机 2和电机 4的转速,保持电机1和电机 3的转速不变,则可使机身绕 x 轴旋转(正向和反向),实现飞行器的滚转运动。
(4)偏航运动:旋翼转动过程中由于空气阻力作用会形成与转动方向相反的反扭矩,为了克服反扭矩影响,可使四个旋翼中的两个正转,两个反转,且对角线上的各个旋翼转动方向相同。反扭矩的大小与旋翼转速有关,当四个电机转速相同时,四个旋翼产生的反扭矩相互平衡,四旋翼飞行器不发生转动;当四个电机转速不完全相同时,不平衡的反扭矩会引起四旋翼飞行器转动。在图 d中,当电机 1和电机 3 的转速上升,电机 2 和电机 4 的转速下降时,旋翼 1和旋翼3对机身的反扭矩大于旋翼2和旋翼4对机身的反扭矩,机身便在富余反扭矩的作用下绕 z轴转动,实现飞行器的偏航运动,转向与电机 1、电机3的转向相反。
(5)前后运动:要想实现飞行器在水平面内前后、左右的运动,必须在水平面内对飞行器施加一定的力。在图 e中,增加电机 3转速,使拉力增大,相应减小电机 1转速,使拉力减小,同时保持其它两个电机转速不变,反扭矩仍然要保持平衡。按图 b的理论,飞行器首先发生一定程度的倾斜,从而使旋翼拉力产生水平分量,因此可以实现飞行器的前飞运动。向后飞行与向前飞行正好相反。(在图 b 图 c中,飞行器在产生俯仰、翻滚运动的同时也会产生沿 x、y轴的水平运动。)
(6)倾向运动:在图 f 中,由于结构对称,所以倾向飞行的工作原理与前后运动完全一样。









评论