- 机器人操作系统(ROS)驱动程序基于ADI产品而开发,因此可直接在ROS生态系统中使用这些产品。本文将概述如何在应用、产品和系统(例如,自主导航、安全气泡地图和数据收集机器人)中使用和集成这些驱动程序;以及这样将如何有助于迅速评估新技术,并避免出现与第三方产品的互操作性问题。在本文探讨的所有产品中,将重点关注最近发布的用于ADI Trinamic™电机控制器的ROS驱动程序,该驱动程序是用于嵌入式运动控制的完整板级模块,融合ADI Trinamic运动控制专业知识,以及ADI的模拟工艺技术和电源设计技能。
- 关键字:
机器人操作系统 ADI Trinamic 电机控制器 ROS
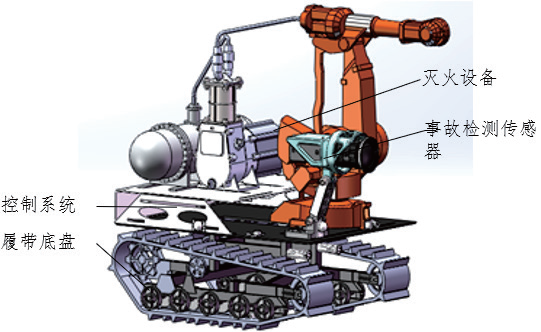
- 针对室内大型场所的三防自动化困难问题,设计了一款室内安防巡逻与灭火多功能机器人,具有电子地图构建、定位、导航、事故处理与远程监控等功能。给出了该机器人总体组成与控制系统软硬件架构,并对机器人核心的电子地图自主构建功能做了实验测试。试验结果表明,该机器人可以自主构建出现实环境的电子地图,保证定位与导航功能的实现基础。
- 关键字:
机器人操作系统 地图构建 路径规划 室内安防 202101
机器人操作系统介绍
您好,目前还没有人创建词条机器人操作系统!
欢迎您创建该词条,阐述对机器人操作系统的理解,并与今后在此搜索机器人操作系统的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
