- 尼得科株式会社的集团公司尼得科仪器株式会社(旧日本电产三协)开发出了能够在真空环境下工作的液晶基板搬运机器人,该机器人具有与在大气环境下工作同等的关节自由度。 在液晶面板和有机EL等显示器的制造工艺中,为了同时实现生产成本的削减和屏幕尺寸的大型化,不断需要更大的母玻璃基板和更快的处理速度。由于可搬运的玻璃尺寸越大搬运效率就越高,因此近年来对3m×3m大尺寸母玻璃基板的搬运需求不断增加。母玻璃基板的薄膜处理、蒸镀等工艺需要极高洁净度的真空环境,因此,搬运机器人也必须具备能承受真空环境的性能。&n
- 关键字:
尼得科 真空环境 搬运机器人
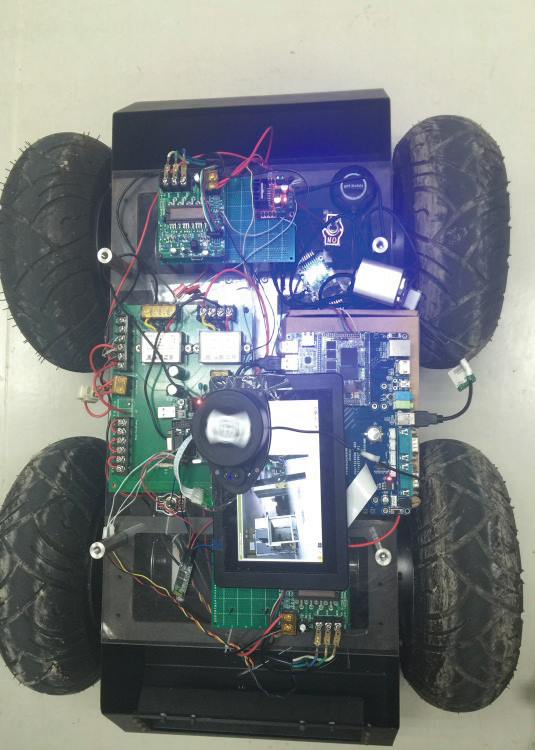
- 大部分的机器人设计都是基于ROS系统,该系统的优点是功能丰富、设计快速,缺点是设计的硬件成本高、功耗高,ROS系统庞大,实时性不高。针对以上缺点,本文阐述的物流机器人的设计是基于ARM架构的S5PV210的CPU,运行嵌入式Linux操作系统,由单片机、S5PV210主板和APP3部分组成。该设计降低了硬件成本、节省了电池功耗,可根据定制需求开发,实时性较高,且运行稳定、负载量大,可在室内动态环境中自主导航并完成相关搬运服务。目前该物流机器人已经制作完成。
- 关键字:
搬运机器人 ARM 嵌入式Linux 单片机 自主导航 202212
- 从技术角度谈当前工业机器人优劣势-随着人口红利逐步消失,我国已成为全球最大的工业机器人市场。根据工信部消息,到2020年,我国将形成较为完整的工业机器人产业体系,高端市场占有率达到45%以上。目前,中国工业机器人的使用主要集中在汽车工业和电子电气工业、弧焊机器人、点焊机器人、搬运机器人等在生产中被大量采用。
- 关键字:
工业机器人 搬运机器人
- 针对搬运机器人的前轮转向舵机和后轮驱动电机的控制要求,采用以Cortex-M3为内核的STM32F107作为主控制器,采用嵌入实时操作系统μC/OS-II,将程序分成启动任务、电机转速控制任务、舵机控制任务等相对独立的多个任务,并设定了各任务的优先级。该系统能较好地实现搬运机器人的运动控制。
- 关键字:
搬运机器人 μC/OS-II Cortex-M3
- 一、直角坐标机器人介绍机器人按ISO8373定义为:位置可以固定或移动、能够实现自动控制、可重复编程、...
- 关键字:
搬运机器人 工件大行程 龙门
搬运机器人介绍
您好,目前还没有人创建词条搬运机器人!
欢迎您创建该词条,阐述对搬运机器人的理解,并与今后在此搜索搬运机器人的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
