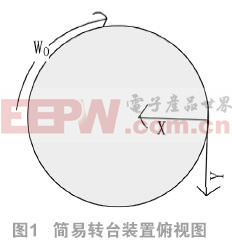
- 本文构建了以MPU6050传感器为核心的数字采集系统,实时采集得到三轴陀螺仪和三轴加速度计随直径为25cm转台旋转一周的运动数据,基于四元素的姿态更新算法描绘其运动轨迹;为验证算法的正确性,分析了传感器在转台上的运动过程,通过计算机仿真模拟上述运动,得到传感器输出数据,仍通过上述算法解算运动轨迹。仿真出运动轨迹确实近似是直径为25cm的圆,从而验证了此算法的准确性。此外,通过对比仿真轨迹结果和实际数据解算运动轨迹,发现由于运动时间延长,陀螺漂移和积分累积误差对轨迹测量的精度有着不可忽视的影响;MPU605
- 关键字:
姿态更新 运动轨迹 仿真模拟 低精度 201707
低精度介绍
您好,目前还没有人创建词条低精度!
欢迎您创建该词条,阐述对低精度的理解,并与今后在此搜索低精度的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
