- 虽然当下机器人的技术手段已经相当成熟,但是如果把其放到水中,则难度系数就大大增加。因为水下控制信号的传播也是一个不小的难题。
- 关键字:
“水下机器人” 南极 海下科研
- 近日,中车株洲所旗下的SMD公司,在英国阿伯丁举行的SPE Offshore Europe展会上,发布了一款具有超强作业能力、绿色环保工作级电驱动水下机器人(简称ROV)——QUANTUM/EV。该型号ROV是目前全球最高性能的电动ROV,可以下潜到6000米深的海底,整机功率高达400千瓦,是目前世界上下潜最深、功率最大的作业级电动ROV。
- 关键字:
中车株洲所 水下机器人 SMD
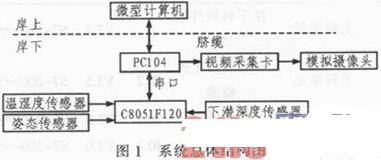
- 该系统的硬件部分主要是采集下潜深度传感器、姿态传感器、温湿度传感器的数据,软件部分采用用Visual C++6.0设计了监控界面。该系统能够实时显示视频和各传感器数据。实际测试表明,该系统具有稳定性高、准确性高的特点,达到了设计要求。
- 关键字:
水下机器人 微型计算机 C8051F120
- 据俄罗斯《消息报》报道,俄罗斯国防部已开始部署“和谐”(Harmony)全球声呐跟踪系统。新系统2020年部署完毕后,俄军方将能“看见”世界各大洋中最偏远和以前无法侦察到的区域,尤其是能跟踪其他大国的军舰和潜艇动向。俄国防部总承包商“特别建设”公司正在新地岛建设一个指挥点。此外,还将在北莫尔斯克郊区建设一个专用车间生产“和谐”系统部件。据《消息报》报道,俄国防部为该系统研制共拨款约70亿卢布(1.08亿美元)。 水下机器人 “和谐”系统是一个海底机器
- 关键字:
水下机器人

- 本文针对水下机器人(Remote Operated Vehicle)的功能和控制需求,建立了ROV运动学模型,设计了ROV闭环定向控制系统。基于PID控制方法,进行了Simulink数学仿真和模拟闭环仿真,计算机仿真试验表明,系统能够较快地稳定到设定值,能够满足对ROV定向控制的要求,航向闭环模拟试验验证了控制系统的可靠性。
- 关键字:
水下机器人 控制系统 闭环控制 PID控制 201701
- 环境监测是通过对人类和环境有影响的各种物质的含量、排放量的检测,跟踪环境质量的变化,确定环境质量水平,为环境管理、污染治理等工作提供基础和保证。简单地说,了解环境水平,进行环境监测,是开展一切环境工作
- 关键字:
环境监测 ZIGBE AVR32 传感器网络 水下机器人
- 文中提出了一种基于CAN总线的水下机器人分布式控制系统结构,主要设计其执行节点,包括P87C591单片机为核心的的硬件电路和软件结构设计。
- 关键字:
CAN 总线 水下机器人 节点设计
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
水下机器人 触觉系统
“水下机器人”介绍
您好,目前还没有人创建词条“水下机器人”!
欢迎您创建该词条,阐述对“水下机器人”的理解,并与今后在此搜索“水下机器人”的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473



.jpg)