速度控制 文章 进入速度控制技术社区
基于单片机的智能车速度控制系统
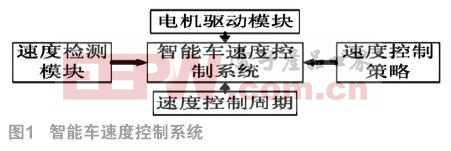
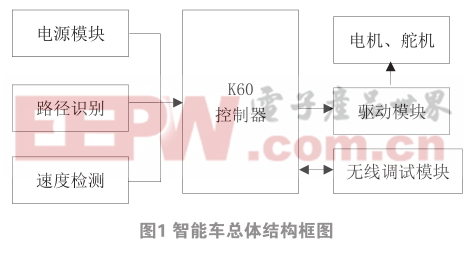
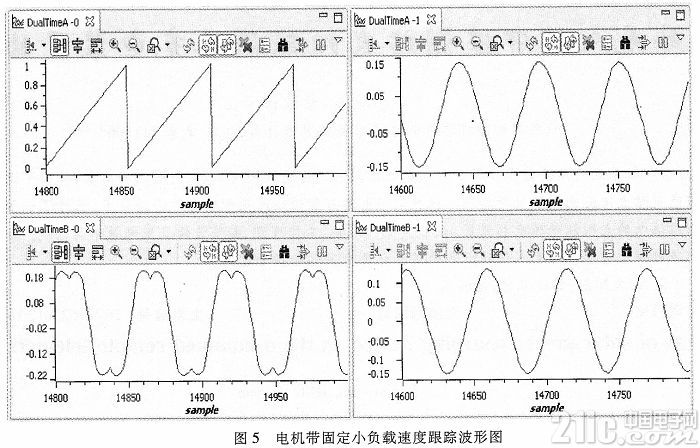
- 本文重点介绍了基于光电自动寻线智能车的速度控制系统的设计,包含直流电机的驱动模块、速度检测模块、速度控制策略、速度控制周期等部分。采用两片MC33886芯片来驱动电机运行,用反射式红外对管检测电机速度,实现对电机的闭环控制,通过大量的试验,最终速度控制策略采用了增量式PID控制和BangBang控制相结合的方法,并创新性地使用两个中断相结合的方法使得速度控制周期为等时的,从而对智能车过弯速度达到良好的控制。
- 关键字: 速度控制 增量式 PID 控制 BangBang 控制 控制周期 201709
基于线性CCD的寻线智能车设计
- 摘要:本设计以第八届“飞思卡尔”杯全国大学生智能车竞赛为背景,提出了一种根据线性CCD采集图像引导直立小车循迹行驶的方案。本文介绍了这一方案的基本思想,所依据的物理原理,并重点介绍在双速度控制
- 关键字: 智能车 直立 速度控制 Kinetis K10 TSL1401CL
基于TMS320F28035的永磁同步电机矢量控制系统研究
- 永磁同步电动机(PMSM)具有体积小、重量轻、结构多样、可靠性高等优点。在数控机床、工业机器人等自动化领域得到了广泛的应用。数字化交流伺服调速系统采用的是目前非常流行的矢量控制算法,即电压空间矢量脉宽调制(
- 关键字: 永磁同步电机 TMS320F28035 矢量控制系统 速度控制 PMSM
速度控制介绍
您好,目前还没有人创建词条速度控制!
欢迎您创建该词条,阐述对速度控制的理解,并与今后在此搜索速度控制的朋友们分享。 创建词条
欢迎您创建该词条,阐述对速度控制的理解,并与今后在此搜索速度控制的朋友们分享。 创建词条