- 水面垃圾会造成水体污染,它不仅破坏了水域生态系统平衡,并且对人类社会的生产和生活也产生了巨大危害,还会影响到船只的航行安全。目前,市面上主要的水面垃圾清理船体型庞大,很难应用在一些小型水域。并且多采用人工搜寻和清理的方式,但是人工搜寻效率低,人力成本高。针对该问题,设计了一款基于机器视觉的水面垃圾寻航系统,该装置基于YOLO-V2卷积神经网络模型进行目标检测,寻找水面垃圾等漂浮物,控制船只靠近目标物进行拾取,通过GPS进行导航,使用蚁群算法和完全遍历算法进行路径规划,同时用ESP32-cam和小熊派完成云
- 关键字:
202307 水面垃圾 卷积神经网络 优化算法 PID 路径规划
- 设计了一款基于遍历算法的智能湖泊环境监测及净化装置,该装置采用全局路径规划和局部路径规划的方法来实现各个功能,全局路径规划通过GPS定位来实现,主要是确定航行的路线和水质的采集,局部路径规划通过摄像头模块运行YOLOV3模型来确定视野内垃圾的位置信息,然后规划出最短路径实现垃圾拾取。
- 关键字:
202306 栅格化 路径规划 遍历算法 深度优先搜索算法 水质检测
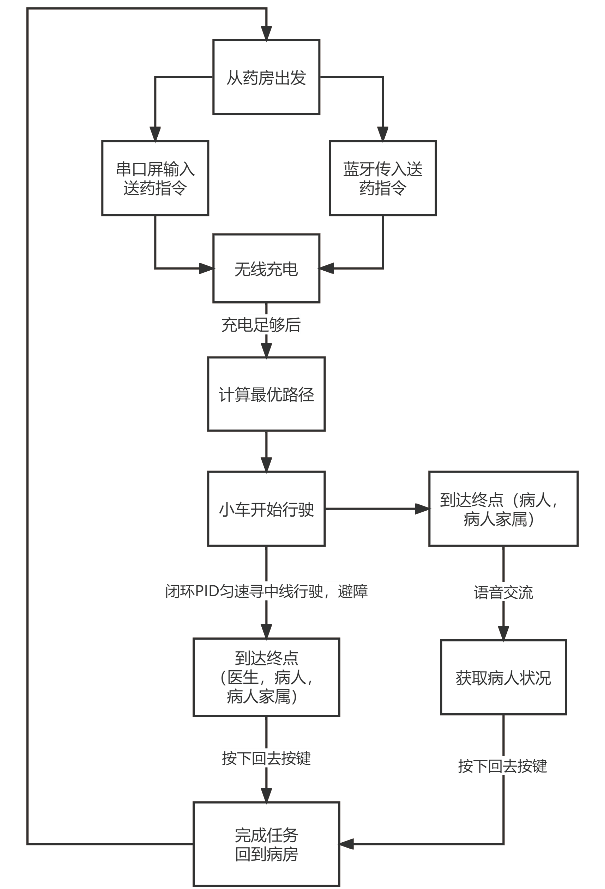
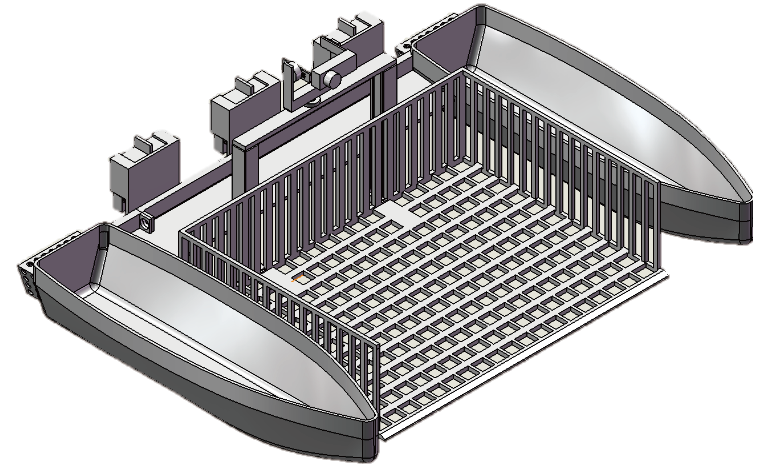
- 多功能可移动的智能化药物运输机器,具有无线充电,自动行驶,人机交互的功能,实现对药物的自动化运送功能。使用基于LCC补偿电路的无线充电方式达到无线充电功能,使用基于蚁群算法栅栏地图的路径规划进行规划最优路径,并用MT9V034摄像头,DRV8701驱动模块达到自动行驶功能。通过usart hmi串口屏,HC05蓝牙模块,LD3320语音模块实现人机交互功能,实现智能化运送药物。
- 关键字:
202306 无线充电 路径规划 人机交互 tc264
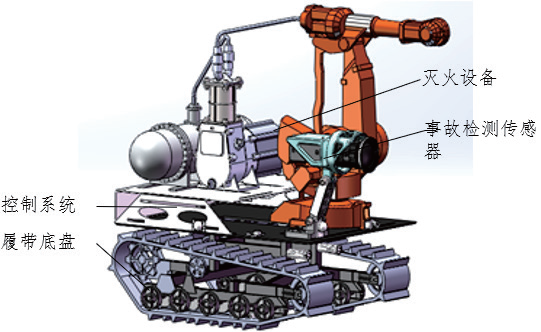
- 针对室内大型场所的三防自动化困难问题,设计了一款室内安防巡逻与灭火多功能机器人,具有电子地图构建、定位、导航、事故处理与远程监控等功能。给出了该机器人总体组成与控制系统软硬件架构,并对机器人核心的电子地图自主构建功能做了实验测试。试验结果表明,该机器人可以自主构建出现实环境的电子地图,保证定位与导航功能的实现基础。
- 关键字:
机器人操作系统 地图构建 路径规划 室内安防 202101
- 党宏社,孙心妍(陕西科技大学电气与控制工程学院,陕西 西安 710021) 摘 要:针对工厂AGV行驶路径复杂、应用局限性等问题,以AGV配送物料行驶路径最短为目标,采用遗传算法进行AGV路径规划,并加入物料类型选择的循环套,通过多次实验确定最合理的控制参数,从而产生AGV运输多种类型物料的最优路径结果。使用Matlab软件对算法进行仿真,结果表明:该算法是有效的,能够直接实现AGV在运输多种类型物料时所产生的不同种路径的优化。 关键词:自动导引车;路径规划;遗传算法 0 引言 随着社会生产技
- 关键字:
202001 自动导引车 路径规划 遗传算法
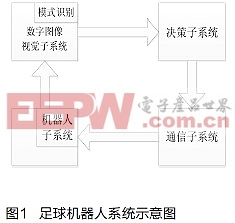
- 摘要:足球机器人系统是一个智能型系统,并且处于一个具有实时对抗性的动态的复杂环境系统中。路径规划层是机器人决策系统的核心之一。本文研究了足球机器人系统的运动学原理,讨论了遗传算法在足球机器人路径规划中的应用,使机器人能避开障碍物从给定点到目标点找到一条比较短的路径,进行仿真实验,比较了不同遗传代数对路径规划的影响。
- 关键字:
足球机器人 路径规划 201302
路径规划介绍
您好,目前还没有人创建词条路径规划!
欢迎您创建该词条,阐述对路径规划的理解,并与今后在此搜索路径规划的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
