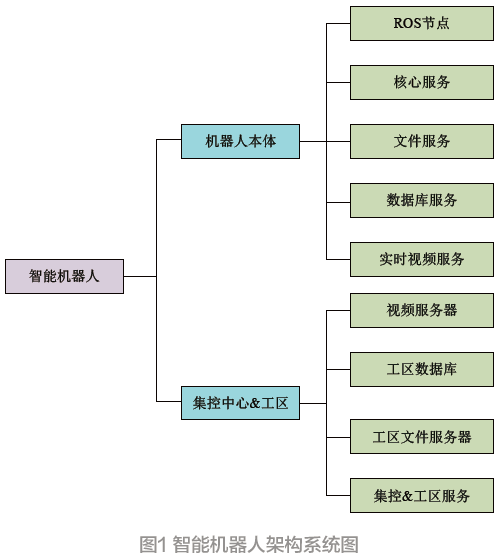
- 为了解决传统变电站倒闸操作及巡检业务效率低下、带电作业危险性较大的问题,本文将人工智能技术和机器人技术结合,利用基于Mean Shift的目标跟踪算法,通过多轴机械手、浮动操作平台、3D视觉相机等手段将人工运维的大部分操作集成至智能机器人上,实现了远程倒闸操作、智能巡检、突发情况紧急分闸等功能,并成功应用于220 kV、110 kV电压等级变电站以及10 kV开关室中,大幅度提升了作业效率,降低人力成本,减少安全风险,推动变电站智能化建设。
- 关键字:
智能机器人 巡检机器人 操作机器人 变电站 图像识别 视觉定位 202205
- IS5403-11具有工件定位功能。使用IS5403-11找到产品,并计算出产品的坐标信息(横坐标、纵坐标、偏转角度),视觉系统将产品的坐标信息(横坐标偏移量、纵坐标偏移量、偏转角度)通过以太网传送给机器人, 机器人根据传
- 关键字:
Cognex 视觉定位 重力对中 嵌入式
- 针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征...
- 关键字:
机器人 目标跟踪 视觉定位
视觉定位介绍
您好,目前还没有人创建词条视觉定位!
欢迎您创建该词条,阐述对视觉定位的理解,并与今后在此搜索视觉定位的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473
