- 在最近一些机器人竞赛中,对于机器人的寻线行走,除了要求精确之外,对机器人寻线速度也提出了很高的要求,速度往往成为某些比赛制胜的关键。在最近教育部推出的全国大学生智能汽车大赛中,更是将寻线速度定为比赛的
- 关键字:
设计 实现 机器人 高速 视觉 基于 移动机器人 单片机 视觉 寻线
- 电子产品世界,为电子工程师提供全面的电子产品信息和行业解决方案,是电子工程师的技术中心和交流中心,是电子产品的市场中心,EEPW 20年的品牌历史,是电子工程师的网络家园
- 关键字:
DSP 智能交通系统 移动机器人 数字信号处理器
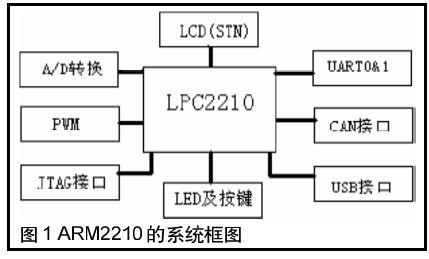
- 移动机器人人机界面为移动机器人的运动控制提供直观的路径图形、运动速度和角度、障碍物信息等。通过ARM2210的串口UART0接收中心处理器PC104的运动信息,利用东芝公司的液晶控制器T6963C驱动STN液晶屏YL240128A,以及ZLG/GUI软件包提供的基本绘图和菜单操作函数设计了基于嵌入式系统ARM2210开发板的移动机器人人机界面,并利用ARM2210的I2C器件ZLG7290提供的I2C接口功能和键盘中断信号实现菜单选择,具有很强的实用性。
- 关键字:
嵌入式系统 人机界面 移动机器人
- 基于DSP的移动机器人的设计与实现 上海交通大学电子信息学院(200030) 王洪升 田蔚风 金志华杭州浙江科技学院教育技术学系(310021) 陈以蒙 摘 要:智能交通系统是21世纪城市交通的发展方向,移动机器人作为智能车辆控制系统实验平台的一个主要部分,对智能交通系统的关键技术的研究具有十分重要的意义。介绍了面向智能交通系统的SJTNC-1移动机器人的组成和结构,并详细叙述了基于数字信号处理器TMS320LF2407A的控制系统的设计和实现。 关键词:智能交通系统 移动机器人 数字
- 关键字:
数字信号处理器 移动机器人 智能交通系统
- 摘 要:本文研究了以TMS320LF2407 DSP为核心的移动机器人运动控制器的设计方案,介绍了主要的系统组成。本系统采用模块化设计,硬件电路简洁,控制可靠。通过步进电机的细分控制,改善了低速性能,以较低的成本满足了移动机器人运动控制的性能要求。关键词:移动机器人;TMS320LF2407;运动控制;模块设计
引言运动控制器是移动机器人的执行机构,对系统平稳运行起着重要作用。在机器人运动控制器中,处理器件接受高层控制级的指令,计算和输出多路控制信号,协调各驱动轮,并
- 关键字:
TMS320LF2407 模块设计 移动机器人 运动控制 模块
移动机器人介绍
目录
1 移动机器人
2 正文
3 配图
4 相关连接
移动机器人-移动机器人
移动机器人-正文 一种由传感器、遥控操作器和自动控制的移动载体组成的机器人系统。移动机器人具有移动功能,在代替人从事危险、恶劣(如辐射、有毒等)环境下作业和人所不及的(如宇宙空间、水下等)环境作业方面,比一般机器人有更大的机动性、灵活性。
60年代后期,美国和苏 [
查看详细 ]
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473