
基于可调式模拟激光脉冲的激光告警器在线检测仪
检测仪机械结构分析
本文引用地址:http://www.amcfsurvey.com/article/98802.htm根据上述原理,我们设计了如图2所示的机械结构,可实现模拟光源在半球面上的可控移动。
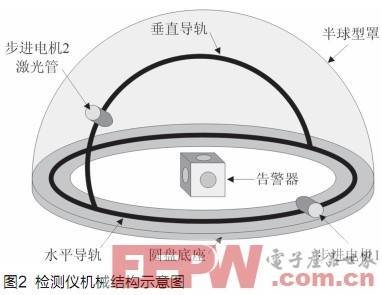
如图2所示,该结构外层为一半球型罩,用于屏蔽外界杂散光干扰;下部为圆环盘型底座,其上固定有环形齿条;环形水平导轨位于底座上,在步进电机1的驱动下为激光管提供方位角调节;带有齿条的半环型垂直导轨连接于水平导轨上,其两端的间距等于水平导轨直径。步进电机2带动激光管在垂直面上运动,为激光管提供俯仰角调节。该结构整体紧凑、重量轻(材料为玻璃钢)、便于安装与运输,使用时不需将告警器从装备上拆下,也不存在检测死角问题。
步进电机采用常规的2相混合式步进电机,步距角为1.8o。电机1输出轴齿轮与水平导轨齿条的齿数比为1:22.3,电机2输出轴齿轮与垂直导轨齿条的齿数比1:12.5(180o覆盖),故方位角的最小调节量为0.08o,俯仰角的最小调节量为0.072o,满足要求。
检测仪电路
本文所设计的告警器检测仪控制电路如图3所示。控制电路的核心为8位Atmel AVR单片机ATmega16[3],具有内部资源丰富、速度快、价格低廉和稳定性高的特点,非常适合于便携式控制设备。图中,IC2为SPI接口12bit串行数模转换器LTC1456,可直接与ATmega16的SPI接口连接,简化了软硬件设计。LD1和LD2分别是输出波长为1.06mm和1.54mm[4]的激光二极管,作为检测仪的模拟光源,由步进电机M1和M2驱动,运行在图2所示的导轨上。为了实现激光管输出功率的可调,必须对其电流进行控制,故设计了由IC2、运放IC3、场效应管Q和电阻R4构成数控电流源[5]。其工作原理为:单片机根据所需设定的激光输出功率对IC2写入控制字后,VOUT端随即输出相应电压;运放工作时同、反相输入端“虚短”,这一作用必然令Q的源极输出一个电流值,使R4上的电压与IC3同相输入端电压相等,从而实现了电流的数字控制。场效应管栅极电流为零,其源、漏极电流相等,故控制精度高,避免了采用双极型晶体管时控制精度受到基极分流影响的问题。R4采用温度系数小的精密线绕电阻,减小了温度对电流控制精度的影响,同时具有较强的抗过载能力。由于两种激光管的输出功率——电流曲线不同,故切换激光管时也必须“通知”单片机,以保持正确的电流控制规律,因此设计了S1_1和S1_2构成的联动开关,单片机通过检测PD4上的逻辑电平来判断当前与Q相接的激光管,以调整控制系数。LTC1456具有异步清零端,这就为激光的调制提供了方便:通过设定单片机的定时器中断,使其溢出频率2倍于欲设定的调制频率,对IC2交替进行写入和清零即可。
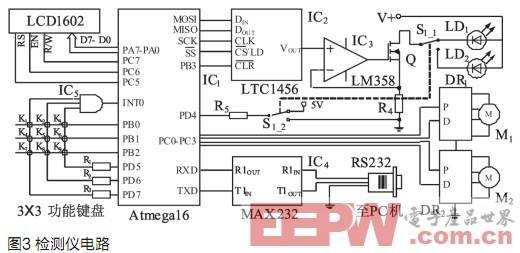
DR1和DR2是2相步进电机驱动器。步进电机运行的步数等于驱动器控制端P接收到脉冲数,而D端是方向控制端;故可控制激光管运行至图2所示半球面上的任意一点。由于步进电机转子的惯性,起步时的输入到P端的脉冲频率不能太高,以防电机失步而使定位控制出现误差。如上文分析,方位角和俯仰角的调节已经足够精细,故不需对步进电机进行细分驱动,节约了成本。
根据用户要求,该检测仪应能与PC机进行通信,以实现更强的数据处理与操作功能,为此设计了以IC4 MAX232为核心的电平转换器,该芯片在5V工作电压下可产生-10V的负压输出,从而与PC机的RS-232串口实现电平兼容,数据和命令字得以传输。
在不具备PC的条件下,检测仪通过一个3×3键盘实现功能操作。其工作原理如下:单片机上电后将PB0~PB2配置为低电平,而将PD5~PD7配置为高电平(AVR单片机I/O口为推挽输出,强上拉),此时3输入与门IC5的输出为高电平。当有按键按下时,IC5输入端出现低电平,故输出下降沿,使INT0中断;进入中断服务程序后,首先将PB0~PB2配置为弱上拉输入模式,然后将PD5置低,接着读取PB0~PB2的逻辑电平。由于单片机内部上拉电阻(数十KW)远大于R1~R3(2KW),因此若K3、K6或K9按下,则必然能在PB0、PB1或PB2读到逻辑0,从而判断出所按下的键号。若未发现PB0~PB2上有低电平,则说明被按下的键不在此列,恢复PD5的高电平,依次置低PD6和PD7,重复上述过程,直至找到所按下的键。











评论