
基于dsPIC33FJ128MC506的CAN通信(07-100)
——
int main(void)
本文引用地址:http://www.amcfsurvey.com/article/92042.htm{
oscConfig() //振荡器设置
/* 清中断各标志位*/
IFS0=0;
IFS1=0;
IFS2=0;
IFS3=0;
IFS4=0;
ecan1Init(); //初始化ECAN1
dma0init(); //DMA初始化
dma2init();
/*使能ECAN1中断*/
IEC2bits.C1IE = 1;
C1INTEbits.TBIE = 1;
C1INTEbits.RBIE = 1;
while (1)
{
/*向ECAN1发射缓冲区写报文并请求发射*/
can1WriteMessage(TXMmessageID, TXMessageLength, TXMessage);
}
}
CANoe测试结果如图2所示。
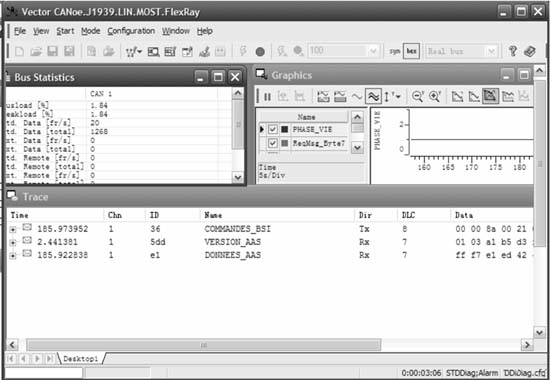
图2 CANoe通讯测试界面


评论