
ARM在数字化远程视频监控系统的应(05-100)
ARM控制CMOS图像采集,然后ARM从图像缓冲SRAM中读取图像数据到ARM内部的LCD显示存储区,显示到LCD屏上。这也就打通了整个数据前向通道,ARM获取了图像后就可以进一步做压缩处理和传输。
本文引用地址:http://www.amcfsurvey.com/article/91471.htmARM程序开发
ARM视频监控系统配备512KB的FLASHROM,用于程序存储器,所以应用程序与原始数据的总和必须小于512KB。以下是ARM程序开发流程:
软件的编写与调试
针对应用编写所需的各种程序,使用ADS(ARMDeveloperSuite)建立工程文件,把编写好的汇编程序*.s文件、C语言程序*.c文件、*.h文件加入到工程中。然后对编译参数进行相应设置,编译工程文件,编译通过后生成可执行二进制代码。使用ADW调试已编译工程,软件调试只能调试ARM指令,无法仿真外围设备;调试通过后,准备下载可执行二进制代码,进行硬件测试。
程序下载的实现
通过bootloader程序来实现对FLASH程序存储器的编程,bootloader程序是自己编写的基于内启动方式下的小程序。
(1)首先让EP7312以内启动方式运行,PC通过串口1(9600bps)接收到"<"标志,
(2)然后PC从串口发送2KB的bootloader程序到EP7312。
(3)这时bootloader程序开始运行,PC通过串口1(115200bps)发送"0x79"与EP7312再次建立连接,随后PC发送"0xFF0xFA"命令,EP7312返回"Len:",PC再发送四字节的要下载的文件长度数据。接着PC继续发送整个要下载的程序,发送完成后将接收到"Ok!",然后编程结束后将接收到"Done!"表明下载编程操作成功完成。
(4)此时重新以外启动方式启动EP7312就可以运行刚下载的程序。
以上是以工程方式来进行ARM应用程序开发的基本流程,在实际使用过程中如果应用到新器件还需要一个硬件调试阶段,在硬件调试通过以后才可以进一步开发应用程序。
有关硬件调试的软件方法
在没有硬件开发工具的情况下,可以通过串口来进行硬件的调试,EP7312与外围硬件的连接基本上有三种方式:直接总线连接、与EP7312的片内外设专用引脚连接、连接EP7312的通用I/O引脚。
以总线方式连接的外设可以通过总线读写来访问;专用外设可以通过内部专门的控制寄存器来访问;经通用I/O扩展的外设则可以通过对内部通用I/O设置寄存器的控制来访问。由于内部专用寄存器都对应固定的总线地址,所以这三种方式都可以通过ARM的总线操作对指定地址的访问来实现调试。
软件设计
在ARM处理器硬件复位以后,需要运行汇编启动代码完成系统初始化,主要包括:中断向量设置、各种处理器模式下的堆栈设置、系统寄存器设置、SDRAM、LCD等外围部件的设置。以下是其部分程序代码:
ldrr1,=DRAMControlvalue;设置SDRAM参数
ldrr12,=rSDCONF;rSDCONF= 0x8000.2300
strr1,[r12]
ldrr12,=rSYSCON2
strr0,[r12];rSYSCON2= 0x8000.1100
ldrr1,=DRAMConfigvalue;设置SDRAM刷新速度
ldrr12,=rSDRFPR
strr1,[r12];rSDRFPR= 0x8000.2340
;------------------------------------------------
ldrr1,=0x06;设置系统时钟为74MHz
ldrr12,=rSYSCON3
strr1,[r12];rSYSCON3= 0x8000.2200
;-----------------------------------------------
MemConfig1valueEQU0x0202023c;nCS0 = NOR FLASH, 8-bit, 0 wait states
MemConfig2valueEQU0x0000023f;nCS4 = for FPGA, 16-bit, 0 wait states
ldrr1,=MemConfig1value;配置存储器位宽格式与等待状态
ldrr12,=rMEMCFG1
strr1,[r12];MEMCFG1= 0x8000.0180
ldrr1,=MemConfig2value
ldrr12,=rMEMCFG2
strr1,[r12];MEMCFG2= 0x8000.01c0
;-----------------------------------------------
ldrsp,=SVCStack;设置堆栈
图2是ARM主程序流程图。ARM处理器从获取图像信息,执行压缩程序,压缩后的文件通过公共电话线路传递到监控主机端。由于系统采用相同的图像分辨率和常量表,所以文件头都相同,为了减少传输数据量,不传送文件头,文件头在监控主机端由软件自动添加。
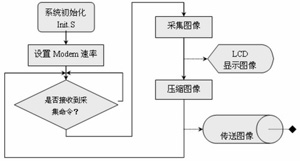
图2 ARM主程序流程图
本系统还使用调制解调器通过公共电话网来建立远程数据连接,在远程图像监控终端处的调制解调器处于待命状态,它使用"ATS0=3&D0W&W1"命令设置为自动应答方式,在3次振铃后自动摘机,经历"数据风暴"以后与主叫方建立连接。监控中心的调制解调器由监控软件控制拨号建立连接或者挂断连接。
数据联接建立好ARM会接收到“CONNECT”字符串表明通讯线路连接成功,此时就可以像使用普通串口一样使用调制解调器建立的远程数据连接。ARM接收到从监控中心发来的采集命令后,依次完成图像采集、压缩处理,然后通过串口以ASC码形式直接发送图像数据到监控中心,完成一次操作后等待下一个采集命令。
结语
本文是完全针对低设备成本、低运行成本和超远距离的图像监控系统应用提出的解决方案,前端使用便宜的一体化高集成数字化视频采集模块,简化了系统前端的设计,大大降低了前端成本;信号处理使用由高速、高性能的ARM处理器与FPGA芯片构建的嵌入式系统,通过软件来实现图像压缩;最后经由公共电话网来实现同城范围内的全数字化远程图像监控。在降低系统成本的同时,提高了系统的灵活性。












评论