
新型CAN智能电动执行器的设计
控制器局部网CAN(Controller Area Network)属于现场总线的一种,是一种有效支持分布式控制或实时控制的串行通信网络,被公认为是最有前途的现场总线之一。
本文引用地址:http://www.amcfsurvey.com/article/85483.htm在工业控制系统中,电动执行器是电动单元组合仪表中一个很重要的执行单元。它由控制电路和执行机构两个在电路上完全独立的部分组成,可接收来自调节器的电控信号,将其线性地转换成机械转角或直线位移,用来操纵风门、挡板、阀门等调节机构,以实现自动控制。近年来,随着微电子技术和控制技术的迅速发展,电动执行器也获得了快速发展,特别是国外一些生产厂商在这几年中相继推出了常规的、带现场总线通信协议的智能电动执行器,而CAN智能电动执行器就是最有发展潜力的一种。
本文介绍的CAN智能电动执行器采用无刷直流电机控制,控制精度高,实现了数字化的阀位检测,可提高阀位测量的精度和可靠性,能取代现行普遍采用的电位器和差动变压器模拟测量方法。
控制电路的硬件设计
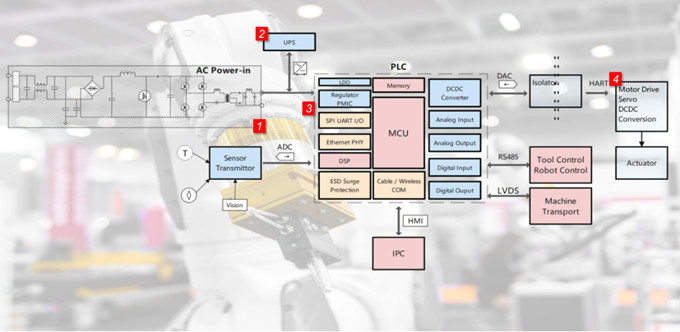
CAN智能电动执行器的原理结构如图1所示。
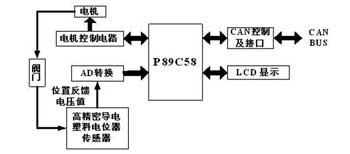
图1 CAN智能电动执行器的原理结构图
整个电路主要由五个部分组成:单片机P89C58为主的主机部分,由SJA1000、82C250、光电隔离电路等组成的CAN总线控制及接口部分,由无刷直流电机专用控制芯片MC33035组成的电机控制部分,阀门位置检测部分和LCD液晶显示部分。
1 CAN总线及接口部分
CAN总线控制及接口如图2所示,主要包括独立CAN通信控制器SJA1000、CAN总线收发器82C250和高速光电耦合器6N137。
单片机P89C58首先对SJA1000进行初始化,控制SJA1000实现数据的通信任务。SJA1000的AD0~AD7连接到89C52的P0口,CS连接到89C52的P2.0口,其余的引脚分别对应相连。

图2 CAN总线及接口部分
为了增强CAN总线节点的抗干扰能力,SJA1000的TX0和RX0并不是直接与82C250的TXD和RXD相连,而是经高速光耦6N137后再与82C250相连,这样就很好地实现了总线上各CAN节点间的电气隔离。82C250与CAN总线的接口也采用了一定的安全和抗干扰措施,它的CANH和CANL引脚与CAN总线之间各串联一个5Ω的电阻,这样可起到一定的限流作用,保护82C250免受过流的冲击;还可以在CANH和CANL引脚上并联小电容,起到滤除总线上的高频干扰和防电磁辐射的作用。82C250的Rs脚上接有一个斜率电阻,电阻大小可根据总线通信速度适当调整,一般在16~140kΩ之间。
2 电机控制电路
该电动执行器里电机控制芯片采用了安森美公司开发的高性能第二代单元无刷直流电机控制器MC33035。该控制器内含可用于正确整流时序的转子位置译码器,以及可对传感器的温度进行补偿的参考电平;同时,还具有一个频率可编程的锯齿波振荡器、一个误差信号放大器、一个脉冲调制器比较器、三个集电极开路顶端驱动输出和三个非常适用于驱动功率MOSFET的大电流图腾柱式底部输出器。电机控制电路原理模块如图3所示。
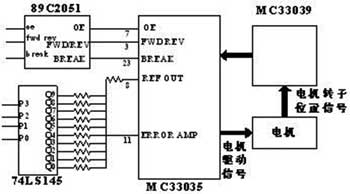
图3 电机控制电路原理模块图
该电机控制电路的功能包括PWM开环速度控制、使能控制和正反转控制。电机的转速控制是利用4-10位译码器/驱动器74LS145的功能,由单片机P89C58给出信号,通过分压电路提供给引脚速度电压来实现的。
电机的使能控制和正反转控制信号也由单片机控制,发出电平信号给89C2051,进行电平转换后输出给MC33035相应的管脚来控制电机的工作状态。
3 阀门位置检测电路和液晶显示
为了实现阀位的数字化检测,在A/D转换电路中采用了ADI公司的16位∑-△(电荷平衡式)A/D转换器AD7705。AD7705包括由缓冲器和增益可编程放大器(PGA)组成的前端模拟调节电路、∑-△调制器及可编程数字滤波器等,能直接将来自传感器的不同摆幅范围内的信号放大到A/D转换器满标度电压附近,再进行A/D转换,实现了0.003%精度的非线性16位无误码数据输出;其增益和数据输出更新速率均可编程设定,还可选择输入模拟缓冲器,以及自校准和系统校准方式。通过外接高精密导电塑料电位器传感器,由基准电压值分压后所得电压值即反映了阀门位置值。
系统采用TRULY公司生产的128×64点阵液晶,它的所有控制器、扫描电路和显示RAM集成于液晶屏背面,并带有LED背光。该模块采用单电源供电,由大规模点阵式显示控制器KS0107、液晶屏阵列驱动电路KS0108、显示存储器和液晶屏等4部分组成。
智能执行器软件设计
软件设计主要包括三个方面:CAN总线通信模块、电动执行器的控制和LCD显示。
CAN总线通信部分可将SJA1000初始化,在其初始化完成以后回到正常工作状态,将执行器的运行情况通过总线向上位机传送,而且操作者可以从上位机下达控制指令来操作执行器。













评论