
高性能数据采集系统中信号的低通滤波原理及实践
随着计算机技术和高性能数据采集卡的迅速发展,高性能的数据采集系统越来越广泛地应用于科研和工业的许多领域。在实际应用中,往往需要对经A/D转换采集到的信号进行频谱分析,例如,航空发动机试车中振动信号的谱分析就对分析和排除航空发动机的振动故障起着极为重要的作用。为了避免信号分析时产生频率混淆,就需要对模拟信号进行低通滤波。笔者在研制开发航空发动机CAT系统的过程中,尝试采用美国MAXIM公司生产的MAX292 八阶低通开关电容滤波器并配合8254定时/计数器,在Pentium计算机的控制下实现对振动信号的低通滤波,并取得了成功。
本文引用地址:http://www.amcfsurvey.com/article/84507.htm1 问题的提出
在对航空发动机振动信号进行采样分析时,单靠增加采样频率不可能消除频谱分析时的频率混淆现象。因为理论上讲,发动机振动信号所包含的频率范围是无限的。那么如何解决这个问题呢?一般采用抗混滤波器来解决。即在采样前,用一截止频率为fc的抗混滤波器,先将信号x(t)施行低通滤波,将不感兴趣或不需要的高频成分滤掉,再将采样频率提高到fs=(2.5~5)fc对信号进行采样及处理。为此,采用MAX292和8454芯片来实现对信号的抗混滤波
2 MAX292低通滤波器及8254定时/计数器
MAX292能按0.1 Hz~25 kHz的转角频率来建立滤波。MAX292为Bessel型滤波器,提供低的过冲和快速置定特性。其引脚结构及典型工作电路如图1(a),(b)所示。
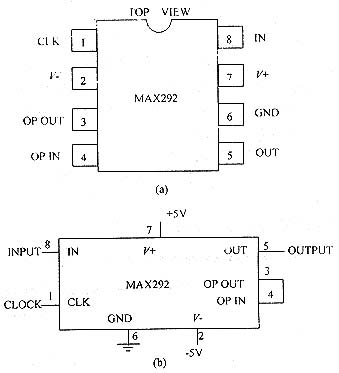
图1 MAX292低通滤波器
MAX292的特点及工作极限参数如下:
时钟可调转角频率范围:0.1 Hz~25 kHz;
不需要外部的电阻器或电容器;
内部时钟或外部时钟;
时钟频率对转角频率之比: 100∶1;
低噪声:-70 dB总谐波畸变+噪声(典型值);
在+5 V单电源或±5 V双电源条件下运行;
独立的运放用于抗混叠或时钟噪声滤波;
8引脚双列直插;
绝对最大额定值:电源电压(V+~V-)±12 V;任一脚处输入电压,V--(0.3 V)≤VIN≤V++ (0.3 V);连续功率损耗(TA=+70 ℃) 727 mW;
工作温度范围(C级): 0~+70 ℃。
其频率响应曲线及相位响应曲线如图2所示(fc=1 kHz)。
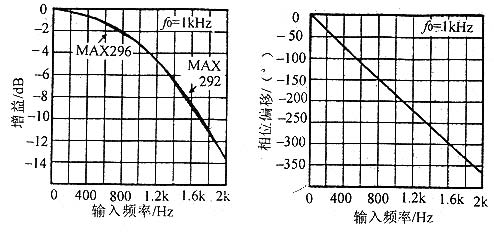
图2 MAX292频率和相位响应曲线
从图2(b)可以看出MAX292具有线性的相位响应,所有的频率分量被等量延迟,这对于保持输入信号的波形具有重要意义。
另外,MAX292低通滤波器的转角频率是通过加在引脚1(CLOCK)上的时钟信号的频率来控制的。在所研制的航空发动机CAT系统中,有时需要改变对振动信号的滤波范围。为此,采用8254定时/计数器来实现对MAX292转角频率的计算机控制。
为了控制MAX292的转角频率,采用8254定时计数器的工作方式3来产生加在MAX292引脚1上的时钟脉冲。8254的工作方式3为方波频率发生器,当控制字写进控制字寄存器后,输出变为高电平。在写完计数值后,计数器将自动开始对输入时钟CLK计数。在计数值完成一半时,计数器将改变输出状态,使输出OUT变为低电平,直到计数结束OUT又恢复为高电平,然后重复此计数过程。这样,就产生一个连续不断的方波,要想改变此方波信号的频率,只需向计数值锁存器重新写入计数值即可。
3 计算机控制低通滤波系统的实现
在以上讨论的基础上,将MAX292及8254集成于数据采集系统中,实现了对振动信号可编程控制的低通滤波。具体联接方式如图3所示(单路)。

图3 计算机控制低通滤波
按图3所示,若将转角频率设置为1 kHz,则要8254之OUT0输出一100 kHz的方波。这时,只要通过计算机向8254计数器的计数值锁存器写入:2M/100 000=20即可实现。
最后值得一提的是,以上的系统从1路扩展到多路是非常方便的,只要增加计数器及滤波器芯片的个数即可实现。另外,对滤波器的控制也可通过单片机来完成,这就使其在工业和科研领域有着广泛的应用前景。

低通滤波器相关文章:低通滤波器原理
电源滤波器相关文章:电源滤波器原理
尘埃粒子计数器相关文章:尘埃粒子计数器原理










评论