
采用8位微控制器实现无传感器磁场定向控制
导言
本文引用地址:http://www.amcfsurvey.com/article/81552.htm由于具有更高的效率、更好的动态响应以及更小的扭矩波动,磁场定向控制(FOC)正越来越多地被应用于消费和工业电机中。采用英飞凌8位微控制器XC886和XC888实现无传感器FOC技术(当输出15kHz PWM载频和133ms电流控制响应时间时)只需要占用58%的CPU负荷,就足以满足特定功能应用的需求。经过高度优化的PWM单元CAPCOM6E能触发模数转换器来测量单直流母线电阻上的电流,为能在标准的8位微控制器上实现无传感器FOC创造了条件。16位无传感器FOC算法仅由片上内嵌的协处理器MDU和CORDIC(矢量计算机)以及8051兼容CPU的联合应用就可以实现。MDU是一个16位乘法和除法单元,CORDIC是一个专用于矢量旋转和角度计算的16位协处理器。
在英飞凌8位微控制器XC886和XC888上实现的无传感器磁场定向控制,能为电器制造商所面临的能耗要求和定价压力提供完美的解决方案。和大多数采用硬编码方式实现的其它类型的FOC不同,基于XC886/8微控制器的解决方案具有软件重复编程能力所带来的附加优势,能向用户提供灵活多变的应用选择。
无传感器的磁场定向控制
磁场定向控制算法需要转子位置的信息。转子位置可以通过诸如编码器或旋转变压器等位置传感器来获得。另一种更省成本的方法是用于无刷直流电机(BLDC)的无传感器FOC。这一方法是基于转子永磁体与定子磁场的相互作用而实现的。
为了确定转子的实际角度,能通过对特定的电压积分来得到磁通量矢量。
![]()
基于特定微分方程的电压模型只是旋转场电机的一个简单模型。定子的电流矢量i_s需要相电流的精确测量。用一个截止频率很低的低通滤波器来代替电流矢量能简化积分。
在标准8位微控制器上实现的无传感器磁场定向控制(FOC)能以最小的系统代价获得正弦换向的全部优势。当在直流环节中只使用单个电阻采样来获取相电流时,对快速精确的模数转换有很苛刻的要求。相电流必须在直流母线电流信号(三相空间矢量脉冲宽度调制的响应)外被重建。
空间矢量是一条中心点能在空间中“浮动”的正弦曲线。三相空间矢量由一个可以被分割成六部分的六边形来表示。电压空间中的任何一条矢量都包含来自其中一相的“实”电压和来自另外两相的“虚”直角电压。空间矢量算法将确定处于第一、第二个有效状态以及无效状态的时间,从而得到所需的空间矢量的幅度和角度。参见图1中的实例。第一个有效状态(b&f)的时间为TU,第二个有效状态的时间(c&e)为T-W,无效状态的时间为T0 ,其会出现两次,第一次出现在(000)矢量位置(a&g),第二次出现在(111)矢量位置(d)。

为了在直流母线电流外重建相电流,必须在有效状态期间触发模数转换器。完美的正弦换向要求空间矢量也能精确地指向六边形的交角处。这样在直流环节上就只有一路相电流被测量,并且也只有一路相电流被重建。但是FOC算法本身不允许出现这一情况。因此必须采用空间矢量脉冲宽度调制来消除六边形的交角。交角的消除会导致输出信号中出现一些纹波,必须尽可能地减小这些纹波。
实际值的获取
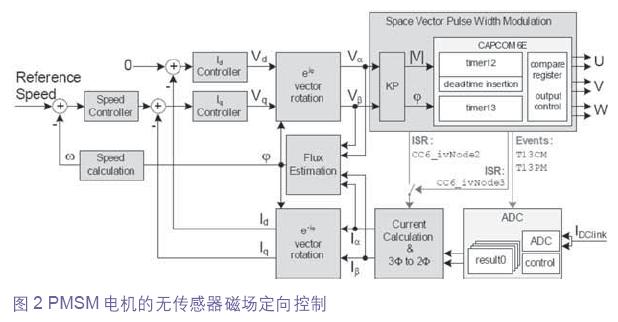
图2显示了带有对永磁同步电机(PMSM)进行速度控制的无传感器FOC的框图。为了通过单个直流母线电阻的测量来估计转子的位置,用来测量电流的PWM模式生成和模数转换器触发必须十分迅速准确。触发点中的任何抖动都将影响对于转子实际角度的估计。从而增加正弦电流信号的总谐波失真。
XC886/888C(L)M采用从PWM单元CapCom6E向模数转换器发出的基于事件的硬件触发来实现上述要求。图3中第二个PWM周期中的绿色闪电状符号代表直接触发模数转换器进行采样的硬件事件。基于事件的触发器能消除任何中断延迟,为快速准确的电流测量创造条件。在信号采样完成后,由于被采样的电压在内部被存储,因此转换状态不再需要在输入端有一个正确的信号。转换完成后,结果被存储到四个结果寄存器之一。两个结果寄存器被用来保存适当的直流母线电流值IDClink。ADC的采样时间仅为250ns。当在图1中的时间间隙(b)和(e)中对电流进行测量时,总是会有足够的时间来进行转换的。
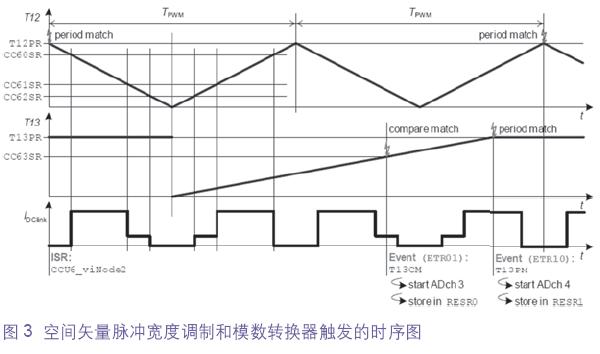
触发时刻可以由CAPCOM6E单元的比较和周期值来进行调整。有两个能互相同步的定时器。定时器T12用来产生空间矢量脉冲宽度调制的波形。器件中采用影像寄存器来存储比较值,从而确保操作不受脉冲毛刺的影响。定时器T13在启动时就被同步到与定时器T12匹配的周期上,用来触发模数转换器。调节比较值和周期值,使电流在有效状态的中间时刻被测量。同时采用两个模数转换器的通道来对被放大的采样电阻上的信号进行采样。得到的结果被存储在两个不同的结果寄存器中。这样FOC计算就能直接读取结果寄存器,而不用担心能否及时触发测量操作。
磁场定向控制的计算
从控制的观点来看,磁场定向控制与直流电机的控制原理类似。基本概念是级联控制,但关键的不同之处在于电气变量(Vd, Id, Vq和Iq)随转子一起旋转。因此,在定子中测得的电流(Iα 和Iβ)必须被转换到转子坐标系中(Id和Iq)。电流控制器在旋转系统中由PI控制器实现,能对场激励产生的d分量和由扭矩激励产生的q分量分别进行控制。和直流电机中的情况一样,速度控制器能调节扭矩激励电流Iq的参考值。由于转子是永磁体,因此场激励电流的参考值Id被设置成零。
电流控制器的输出代表转子坐标中的参考电压(Vd和 Vq)。为了计算出极坐标(模和辐角),这些值必须被转换到定子的坐标系中(Vα和Vβ)。采用空间矢量脉冲宽度调制,通过调制相应功率逆变器的高边和低边开关,就能将模和辐角转换成三相电流的形式。
所有计算都在定时器T12周期匹配时被调用的中断服务程序中逐步执行。计算执行所需的时间比一个PWM周期要长。结果,控制环路时间必须为PWM周期的两倍,即在20KHz的PWM频率下,控制环路每100祍被计算一次。
FOC驱动应用套件:CANmotion
FOC 驱动应用套件可为客户对采用FOC技术的永磁同步电机(PMSM)控制设备的评估和开发提供经济高效的方法。
该套件的特色之一是带有集成XC886CM MCU (TQFP-48)和3相逆变器(具有控制24V BLDC所需全部功能)的评估板。完整的无传感器FOC源代码配合全面的文档,使用户能立即进行FOC开发。
套件中还提供了再次采用XC886CM建立的CAN到USB的接口,来进行16位代码的下载和参数调节。基于CAN报文的用户界面使用户能够设置并修改所有用于速度和电流控制的电机控制参数。独特的基于CAN的监控技术能为电机控制应用提供实时控制。24V BLDC和插入式电源使该套件能随时被使用。
预编译演示板可提供轻松评估FOC算法和测量其性能的平台。完整的开发环境包括一套免费的工具链,能使用户预先进入应用开发的下一个环节,并使用相同的应用套件进行定制。
欲获取关于英飞凌无传感器FOC算法和FOC驱动应用套件的详细信息,敬请访问:。







评论