
双速度环在双马达直流调速系统中的应用
在以往的双马达直流调速驱动系统中,从环路上米讲,采用的都是双电流环单速度环工作体制。对每个马达控制器来说,除了电流环以内的有关电路可以利用外,每个马达控制器上的速度调节器和速度反馈电路都不能利用,为了对两个马达的转速进行控制,还必须另做速度环,这显然是多余的。
本文引用地址:http://www.amcfsurvey.com/article/78044.htm本文介绍采用双速度环的方案实施控制时。在实际应用中会出现哪些不同于单速度环体制双马达驱动系统的新问题,以及如似解决这些问题。
1 单速度环的双马达驱动系统
烈马达驱动系统采用的足单速度环体制。其原理如图1所示。由图1可以看出,对单速度环双马达驱动系统来说两个马达共用一个速度调节器,从两个马达的测速机输出取信号求和后作为速度反馈信号来构成趣度环,从而把两个独立的电流环闭在同一速度环内。
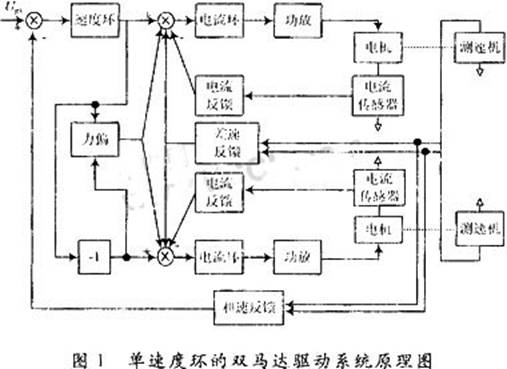
力矩偏置信号是从速度调节器的输出取出作为力矩偏置电路的输入,将力矩偏置电路的输出作为电流环的一个输入分量,通过两个独立的电流环给两个马达施加大小相等、方向相反的偏置力矩,以起到消除传动齿隙、提高系统性能的作用。
由于偏置力矩的引入,必然会引起处于动态运行状态下的两个马达之间的差速振荡。若不采取其他措施,由和速度反馈信号构成的单速度环自身是无法抑制这种差速振荡的,只有从两个测速机输出取信号求差后分别引入两个马达的电流环,才能起到抑制双马达运行过程中所产生的差速振荡的作用。
2 双速度环双马达直流驱动系统
2.1 系统原理框图
双速度环双马达直流驱动系统的原理框图如图2所示。由图2可以清楚地看到,双速度环双马达直流驱动系统中的两个电流环及两个速度环均是完全独立的。

力矩偏置信号是从两个速度调节器的输出取出作为力矩偏置电路的输入,然后与双电流环、单速度环的双马达驱动系统一样,把力矩偏置电路的输出分别引入到两个电流环,给两个马达施加大小相等、方向相反的偏置力矩,以起到消除传动齿隙的作用。
2.2 双速度环驱动系统的特点
2.2.1 可以自行抑制双马达之间的差速振荡
与单速度环双马达驱动系统一样,力矩偏置信号的引入仍然会引起动态运行状态下的两个马达之间的差速振荡,但对双速度环来说,无需采取其他措施便可以起到抑制差速振荡的作用。因为不论系统处于何种状态下,两个速度环是独立的,速度指令Ugv1总是与取自测速机TG1的反馈信号Ufv1相比较构成速度闭环,力图使Ufv1的幅值与Ugv1的幅值相等。同样,速度指令Ugv2总是与取自测速机TG2的反馈信号Ufv2形成另外的速度闭环,力图使Ufv2幅值与Ugv2的幅值相等;而两个速度环的输入指令Ugv1,Ugv2的幅值总是相等的,所以两个独立的速度环调节的结果使得两速度反馈信号Ufv1和Ufv2的幅值尽量相等,而Ufv1和Ufv2又与各自相对应的马达转速成正比。
通常情况下,可以认为两个测速机的灵敏度(即两个测速机的输出电压与各自所对应的马达转速之比)是一样的,所以两个独立的速度环控制的结果总是使得两个受控的马达之间的转速相等,也就是说他可以起到自行调节任何状态下的两个马达之间转速不一致的作用,当然可以起到抑制差速振荡的作用。
2.2.2 两马达有可能出现输出力矩不一致的现象
由于两个啮合在一起的马达分别受控于两个独立速度环,所以在运行过程中有可能出现两个马达的输出力矩不一致的现象,原因分析如下:
首先,两个马达是通过传动机构啮合在一起的,所以当系统处于稳态运行时,两马达的转速是相等的。虽然两马达的转速相等,两速度环的输入指令Ugv1,Ugv2的幅值也相等,由于两马达所对应的测速机的性能客观上存在一定差异,致使两测速机输出电压的幅值不一定完全相等,也就是说两速度环的速度反馈信号Ufv1和Ufv2的幅值并不完全相等,使得|Ugv1-Ufv1|≠|Ugv2-Ufv2|,必然造成两电流环的输入指令Ugi1和Ugi2二者幅值不等。
其次,即使|Ugv1-Ufv1|=|Ugv2-Ufv2|,但由于两速度环所用的速度调节器ST1,ST2是独立的,尽管调节器ST1和ST2的各对应元件的标称值完全一样,由于元件的离散性也必然造成Ugi1和Ugi2二者的幅值不等。
综上所述,无论是两个速度反馈信号之间存在幅值上的差异,还是两个速度调节器各对应的元件之间的离散性,都会导致两个电流环的输入指令Ugi1,Ugi2的幅值不等,当然两马达输出的电流就不一样,也就是说两马达的输出力矩不一致。
若速度调节器ST选用比例调节器,两马达输出力矩的差异还不会太严重,如果ST选用比例积分调节器,那么工作在双速度环体制下的同一驱动系统中的两个马达就有可能出现一个马达的输出力矩很小,而另一个马达的输出力矩则很大的现象,这样输出电流小的马达就明显的成了输出电流大的马达的负载,这种现象必须想办法克服。
2.2.3 力矩均衡
从前面的分析可知,双速度环体制有可能造成两个电流环的输入指令幅值不相等,从而导致了两马达的输出力矩的不一致,如果能使得两个电流环的输入指令的幅值趋于相等,就可以起到抑制两马达输出力矩不一致的作用。目前工程中采用的办法如图2中所示,即从两电流反馈Ufi1,Ufi2取信号,通过求差电路(力矩均衡电路)将输出信号△M分别引入两马达的速度环输入端,也就是在速度指令Ugv1和Ugv2上分别迭加一个和两个马达的输出电流有关的输入分量△M。
系统在运行过程中,在不考虑偏置电流的情况下,若两马达的输出电流幅值相等,则电流反馈信号己Ufi1,Ufi2二者幅值相等,△M=0;若马达输出电流幅值不等,则△M≠0,假若Ufi1的幅值大于Ufi2的幅值,只要△M能起到使Ugi1的幅值下降,Ugi2的幅值上升,反之,若Ufi1的幅值小于Ufi2的幅值,△M能起到使Ugi1的幅值上升,Ugi2础的幅值下降的作用,便可以确保双速度环控制的双马达系统中的两个马达系统中的两个马达的输出力矩趋于一致,实验证明这种方法确实是行之有效的。
3 结 语
双速度环驱动系统已应用于工程中,实践证明了他的可行性和独特的优越性。


评论