
基于dsPIC30F4012型微处理器的三相电压型PWM整流器研究
摘要:建立了电压型PWM整流器模型,提出一种实用的电流解耦方案,给出一种由dsPIC30F4012型微处理器控制的三相电压型PWM整流器控制系统,详细介绍其系统组成、控制原理及硬件结构,论述其软件流程,给出实验结果。
关键词:PWMi dsPIC30F4012;电流解耦控制;电压型整流器
引言
近几年,在AC/DC变换中,PWM整流器因其能够实现高功率因数运行且几乎不产生谐波而倍受关注。关于PWM整流器的研究在我国也进行了很多年,其实施方案主要有电压型PWM整流器和电流型PWM整流器。电流型PWM整流器由于存在直流储能电感及交流LC滤波环节.因此结构和控制相对复杂,系统损耗较大。而电压型PWM整流器以其较低的损耗、简单的结构及控制等一系列优点而成为PWM整流器的研究重点。
1 PWM整流器工作原理

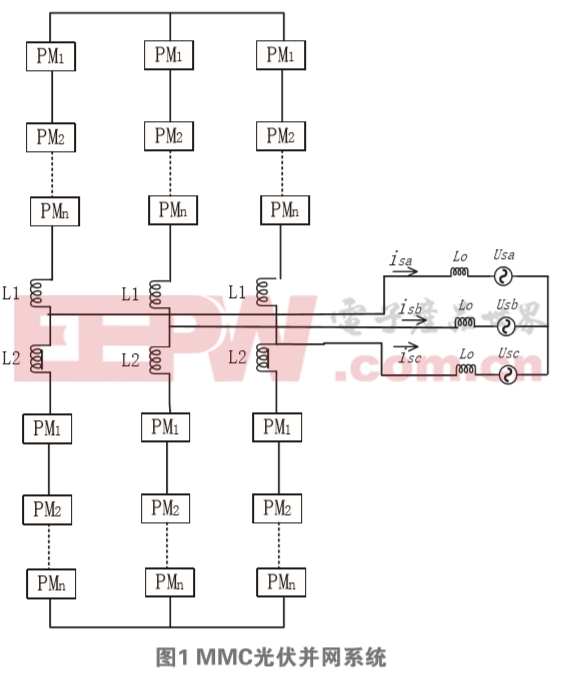
图1示出三相电压型PWM整流器主电路。当整流器进入稳态工作状态后,输出直流电压恒定,整流桥的三相桥臂按正弦的脉宽调制规律驱动。开关频率很高时,由于电感器的滤波作用,高次谐波电压产生的谐波电流非常小,如果只考虑电流和电压的基波,整流桥可以看作是一个理想的三相交流电压源。适当调节控制量的大小和相位,就能控制输入电流的相位,可以达到改变功率因数的目的,其中对控制输入电流的大小以控制传入变换器的能量,也就控制了直流侧电压。可见PWM整流器的控制目标是输入电流和输出电压,而输人电流的控制是整流器控制的关键。输入电流的控制目标是使电流波形成为正弦波且与输入电压同相位。
2在d—q坐标中的数学模型[1,2,3]
在PWM整流器控制方法上,笔者将三相交流电流旋转变换成在d-q坐标系中进行,以对电流的d、q分量进行单独控制。有功功率和无功功率的调节十分方便。
图1中的PWM整流器U∞、U∞、U∞分别为整流桥三相控制电压,有方程式:

采用空间坐标变换方法,将上述方程变换到二相静止坐标中,其变换矩阵为

再进一步由α-β坐标系变换为d—q二相旋转坐标系,变换矩阵为变换方程为

经过以上变换后,在同步旋转坐标系下PWM整流器方程为:

usd,、usq,id、qi。,Ud、Uq分别为d—q同步旋转坐标系下的电源电压、输入电流和桥中点控制电压。以输人电压合成矢量的位置为d轴的正方向,取三相输入电压usc,usb,us为

则经过同样坐标变换,在d—q同步坐标系下有

将(8)式代入同步旋转坐标系下PWM整流器的方程(6)式可得

由此式可见,id与iq之间存在耦合,通常有电压前馈解耦控制和电流反馈解耦控制二种,前者虽是一种完全线性化的解耦控制方案.但实时性并不好。笔者采用电流反馈解耦控制方式,实施方便,控制电路简单。
在实际应用中.当电压环的采样频率远高于电网电压的频率时,在方程中造成互耦的ωLid和ωLid对电流调节器性能影响较小[1],可忽略,这样将电流控制指令id*、iq*与反馈电流id、iq比较,其误差经过P,调节得到电压给定信号,得出近似解耦模型,即:

PWM整流器基本控制框图如图2所示。当PWM要得到单位功率因数时,则输入电流要跟踪输入电压,d—q坐标系中,将输入电压矢量定位在d轴上,这样控制电流矢量也同样只有d轴分量,而q轴分量为零。满足iq*=O即可。笔者采用电压外环和电流内环相结合的双闭环控制方案。id*为电压调节器输出,它与有功电流成正比。

3 硬件电路组成
本系统采用Microchip公司专为电机高速控制生产的dsPIC30F4012型16位微处理器作为核心控制电路组成全数字化PWM整流器。dsPI(230F4012有1个16位CPU和1个dSP内核,当内部最高时钟频率为120MHz时,进行一次16bitxl6bit运算的时间为8.3ns:另外包括2048字节的寄存器RAM、48KB的片内程序空间、1024字节的,EEPR()M、中断7个I/0口共21条I/0口线,有1路全双工的UART功能模块、1个同步串行SPI功能模块、1个FC串行通信模块和1个CAN串行通信模块,片内设有1个6通道的A/D转换器,工作在10位模式,采样保持时间、转换时间、阈值检测方式和零偏补偿校正均可编程;5个16位定时器;有4路捕捉器、2路比较/标准脉宽调制单元(PWM)模块;1个6通道的电机专用MCPWM控制器。dsPIC30F4012内M(2PWM电机专用PWM控制器是其设计特色之一;这一设置大大简化了产生PWM波形的控制软件和外部硬件.通过编程可产生独立的、具有相同频率和工作方式的三相6路PWM波形.并由RE口直接输出6路PWM信号给整流器。每个引脚驱动电流达25mA,为防止同一桥臂上2个功率管直通造成短路。该发生器还可通过编程设置死区互锁时间,在外部时钟10MHz经内部8倍频后的系统时钟为80MHz时,死区时间范围根据分频系数的不同分为系数为1:1时为50ns~3.15μs;系数为l:2时为100ns~6.3μs,系数为1:4时为200ns~12.6μs:系数为1:8时为400ns~25.2μs。

图3示出系统组成框图,本方案的硬件主要由输入电压相位和幅值检测、输入电流检测、输出电压检测、驱动和保护电路等组成。电流和电压检测采用霍尔传感器,经过适当的信号转换后输入到dsPIC30F4012的A/D端。驱动电路采用EXB841。
4 系统软件设计[4]
系统软件主要由主程序和二个中断服务子程序组成。主程序部分主要是对控制软件进行初始化,设置dsPIC30F4012的各种功能模块,以设定系统各个功能模块的工作方式。系统包含二个中断服务程序,即电流中断服务程序和捕获口中断服务程序。捕获口中断服务子程序流的作用是对输入信号进行定位。电流中断服务程序用来完成电压、电流的调节及输出PWM信号到硬件电路,以控制开关管从而达到控制主电路的目的.同时完成各种软件保护的查询与输出保护信号的功能,图4示出电流中断服务子程序的流程。

5 实验结果与结论
基于dsPIC30F14012的电压型PWM整流器的输入交流相电压为220V、输出直流电压为600V。输入电感为7.5mH,整流负载为50Ω。本系统主电路采用三菱公司的CMl50DY-24H型150A/1200V型IG-BT,驱动采用EXB84l厚膜电路。实验证明:电流基本为正弦波并且与电压波形相同,实现了单位功率因数,用电力谐波分析仪测得的电流总畸变率(THP)为3.8%。
通过对PWM整流器在d—q坐标下的数学模型的推导和分析,提出了一种较适用的d—q坐标系下的近似解耦控制方法.并采用功能强大的dsPIC30F4012型微处理器作为核心实现全数字化PWM整流器。从实验结果看效果良好。具有较好的应用前景


评论