
数据融合在舰炮系统低角跟踪中的应用
1 引言
现代海战中,飞机或导弹的低空、超低空突袭,尤其是具有“低、小、快”战术特性的掠海导弹,对水面舰艇的安全构成极大的威胁。因受到地球曲率、多路径效应、背景杂波的影响,以及隐身技术的广泛采用,雷达在较远的距离,发现和稳定跟踪掠海导弹较困难,即使在近距离上发现和跟踪这样的高速目标,防御武器系统也很难有充足的反应时间。因此,水面舰艇探测系统必须解决好对低空掠海导弹的发现及稳定跟踪问题,保证舰载武器和系统能有效地拦截低空、超低空目标。
舰炮系统中一般配有火控雷达和光电系统等探测设备,这些传感器一般只起互补的作用,一种传感器由于被干扰或故障不能作用时,改用另一种传感器。在多传感器的使用上,仅仅做了优化选择,各种传感器的信息没有进行真正意义上的融合。若能充分利用这两种传感器的各自优点,采用多传感器数据融合技术、复合跟踪技术,可极大的提高舰炮系统对低空目标的发现和跟踪性能。
2 海面低空目标多路径效应
2.1 多路径几何模型
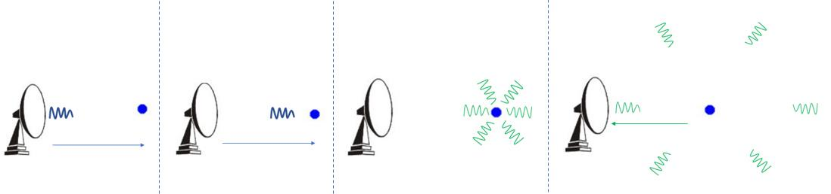
雷达在探测低空掠海飞行的目标时,天线具有一定的仰角。雷达波束照射目标的同时必然会照射一定区域的海面,回波信号有可能直接或经过海面反射后到达雷达接收天线。直达波和反射波相互干涉,引起仰角误差信号在幅度和相位上发生变化,引起的误差为多路径误差。
海面多路径反射分为两部分:镜面反射和漫反射。
(1) 镜面反射:镜面反射波与直达波是相关的,他满足瑞利判据,即:
其中:△h是反射面高度的变化,Ψ是擦低角,λ是波长。如图1所示。

(2) 漫反射:在海面除了镜面反射,还有漫反射,他随海水的运动起伏,漫反射波与直达波是不相关的,是由海面前向散射分量形成,多普勒频移与直达波基本相同。
2.2 多路径效应对角跟踪系统的影响
多路径效应对雷达低空目标跟踪的主要影响表现在俯仰角上,根据反射信号(或镜像目标)进入的雷达波束区域,分为3种误差区域:
2.2.1 副瓣反射区
在副瓣反射区内,误差主要是由镜面反射引起的,主波束不照射到反射表面,反射信号指通过天线波束的副瓣进入雷达接收机,多路径误差是周期性的,其均方根误差为:
其中,θB是天线仰角波瓣宽度,Gsc是波瓣主瓣的峰值功率与镜像信号所在角度上的差波瓣旁瓣的峰值功率之比。
2.2.2 主瓣反射区
当目标仰角低到跟踪雷达的主瓣一侧照射表面时,反射信号将进入主瓣。跟踪误差为:
其中,△t∑t是直射波方向的差信号与和信号,△r∑t是反射波方向的差信号与和信号,ρ是表面反射系数,a是反射信号相对直射信号的总相移。
2.2.3 水平反射区
目标信号与反射信号在俯仰方向上非常接近,同时进入天线主瓣,接受信号功率衰落很大,此时,多路径误差为两个反射体目标的闪烁误差。跟踪误差为:
其中,e是相对于目标的距离误差,ρ是表面反射系数,φr为直射路径与反射路径的路程差。
以单脉冲雷达为例仿真,假设目标高度为10 m,天线高度为15 m,反射系数ρ=0.8,匀速直线向雷达方向飞行,多路径效应随距离变化,引起的俯仰角误差如图2所示。

从图2可以看出,雷达跟踪低空掠海目标时,多路径效应将严重目标俯仰角的测量,这种误差可分为两种:一种是高信噪比阶段时近似恒定的偏差,另一种是低信噪比阶段时的尖峰误差。尖峰误差出现在直达波和反射波的相位差约180











评论