
PIC18FXX8单片机通用同步异步收发器的编程应用
摘 要:本文介绍了Microchip公司推出的PIC18FXX8单片机通用同步异步收发器USART(串行通信接口)的相关内容,给出了单片机该模块的接口电路和C语言应用编程。
0 引言
PIC18Fxx8单片机是美国微芯公司推出的16位RISC指令集的高级产品,由于芯片内含有A/D、内部E2PROM存储器、I2C和SPI接口、CAN接口、同步/异步串行通信(USART)接口等强大的功能,具有很好的应用前景。但是,目前介绍其应用和以C语言编程的中文参考资料很少。本文将探讨该型单片机异步串行通信的编程应用,程序用HI-TECH PICC-18 C语言编写,并在重庆大学-美国微芯公司PIC单片机实验室的PIC18F458实验板上通过。
1 PIC18FXX8单片机同步/异步收发器(USART)
通用同步/异步收发器(USART)模块是由PIC18FXX8内的三个串行I/O模块组成的器件之一(USART也叫串行通信接口即SCI),可以配置为全双工异步方式、半双工同步主控方式、半双工同步从动方式三种工作方式。
TXSTA是PIC18FXX8单片机串行通信发送状态和控制寄存器,RCSTA是接收状态和控制寄存器。由于在实际工程中,异步方式用得最多,这里仅介绍异步工作方式,其它方式可参阅相关资料。
1.1 USART 异步工作方式
在异步工作方式下,串行通信接口USART采用标准的不归零(NRZ)格式(1位起始位、8位或9位数据位和一位停止位),最常用的数据位是8位。片内提供的8位波特率发生器BRG可用来自振荡器时钟信号产生标准的波特率频率。通过对SYNC位(在TXSTA寄存器中)清零,可选择USART异步工作方式。
1.2 USART波特率发生器(BRG)
USART带有一个8位的波特率发生器(BRG),这个BRG支持USRAT的同步方式和异步方式。用SPBRG寄存器控制一个独立的8位定时器的周期。在异步方式下,BRGH位(控制寄存器TXSTA的)也被用来控制波特率。在同步方式下,用不到BRGH位。表1给出了在主控方式下(内部时钟)不同USART工作方式时的波特率计算式。
表1 主控方式下的波特率计算式
|
SYNC |
BRGH=0(低速) |
BRGH=1(高速) |
|
0 |
(异步)波特率=FOSC/[64(X+1)] |
波特率 = FOSC/[16(X+1)] |
|
1 |
(同步)波特率=FOSC/[4(X+1)] |
无 |
1.3 USART 异步工作方式配置
下面是串行通信异步工作方式配置步骤(顺序可以改变):
(1)配置发送状态和控制寄存器TXSTA;
(2)配置接收状态和控制寄存器RCSTA;
(3)配置RX(RC7引脚)、TX(RC6引脚)分别为输入和输出方式;
(4)通过设定的通信波特率配置SPBRG寄存器,计算公式参见表1;
(5)设置串行通信接收或发送中断是否使能;
(6)清串行通信接收或发送中断标志;
(7)设置串行通信接收中断或发送中断的优先级是高或低优先级中断方式,PIC18单片机默认情况下是高优先级中断,若是低优先级中断,则必须进行设置;
(8)设置串行通信接收和发送数据是否允许。
若用到了中断功能,还需设置总中断和外围中断使能,以开放未屏蔽的中断。
2 USART接口硬件电路
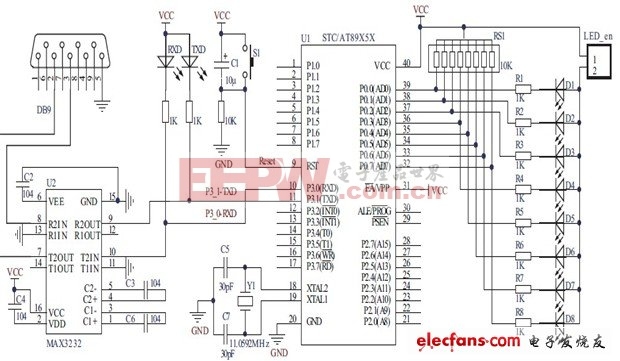
利用PC机配置的串行口,可以很方便地实现PC机与PIC18单片机的串行数据通信。PC机与PIC单片机USART连接最简单的是三线方式。由于PIC单片机输入、输出电平为TTL电平,而RS-232C PC机配置的是RS-232C标准串行接口,二者电气规范不一致,因此要完成PC机与微控制器的串行数据通信,必须进行电平转换。图1为PIC18F458单片机的RS-232电平转换电路。图中MAX232(或MAX202)将PIC18单片机TX输出的TTL电平信号转换为RS-232C电平,输入到PC机,并将PC机输出的RS232C电平信号转换为TTL电平输出到PIC微控制器的RX引脚。J9和PC机的连接方式见RS-232标准,与单片机相接的D型头(J9)的2脚(PIC接收信号)与接PC机D型头的3脚(PC机发送信号)相连,与单片机相接的D型头(J9)的3脚(PIC发送信号)与接PC机D型头的2脚(PC机接收信号)相连,二者的5脚与5脚相连(地相连)。PC机串口数据的发送和接收显示均可采用各种串口调试软件,我们使用的是串口调试助手V2.2(或V2.1、V2.0均可),在网上可以下载该调试软件,该软件操作简单,这里不作介绍。
3 USART异步工作方式编程
串行通信的接收有查询和中断2种方式,在实际应用中,一般不采用查询接收数据,常用的是中断接收数据。发送有中断发送和非中断发送,在下面的例程中我们采用了中断接收数据,发送数据采用中断方式还是非中断方式可以在程序中通过对发送方式标志Send_Mode(不为0,中断方式发送;=0,非中断方式发送)进行设置实现。
在PIC单片机发送数据时,发送中断标志TXIF不能用软件清0,只有当新的发送数据送入发送数据寄存器TXREG后,TXIF位才能被硬件复位,因此在程序中清该标志是无效的。采用中断发送数据的方法是:在主程序中启动发送一串数据的第一个数据,然后利用发送完成中断启动下一个数据发送,当一串数据发送后,不再发送数据,但有发送完成中断标志,程序还要进入一次中断,这最后一次中断对数据发送是无用的,必须将该标志清0,采用的方法是禁止发送使能(TXEN=0)而引起发送被终止或对发送器复位。
下面是一个用串行通信进行接收和发送数据的例程,程序实现功能:PIC18单片机接收到PC机下发的8个数据后,将收到的8个数据以中断或非中断发送方式返送回PC机。
#include "pic18.h" /* PIC18系列的头文件 */
unsigned char receive232[8]; /* 接收数据数组 */
unsigned char send232[8]; /* 发送数据数组 */
unsigned char receive_count=0; /* 接收数据个数计数 */
unsigned char send_count=0; /* 发送数据个数计数 */
unsigned char *pointer; /* 发送数据指针 */
unsigned char i; /* 程序中用到的循环变量 */
unsigned char SciReceiveFlag; /* =1,接收到8个数据 */
unsigned char Send_Mode=0; /* 不为0,中断方式发送;=0,非中断方式发送 */
void sciinitial() /* 串行通讯初始化子程序 */
{
TXSTA=0x04; /* 选择异步高速方式传输8位数据 */
RCSTA=0x80; /* 允许串行口工作使能 */
TRISC=TRISC|0X80; /* :将RC7(RX)设置为输入方式 */
TRISC=TRISC&0Xbf; /* RC6(TX)设置为输出 */
SPBRG=25; /* 4M晶振且波特率为9600时,SPBRG设置值为25 */
PIR1=0x00; /* 清中断标志 */
PIE1=PIE1|0x20; /* 允许串行通讯接口接收中断使能 */
RCIP=0; /* 设置SCI接收中断为低优先级中断 */
CREN=1; /* 允许串口连续接收数据 */
if(0==Send_Mode) TXEN=1; /* Send_Mode=0,非中断方式发送,串口发送数据使能 */
else /* Send_Mode=1,中断方式发送 */
{
PIE1=PIE1|0x10; /* 允许中断发送 */
TXIP=0; /* 发送低优先级中断 */
}
}
void interrupt low_priority LOW_ISR() /* 低优先级中断子程序 */
{
if(RCIF==1) /* RS232接收中断 */
{
RCIF=0; /* 清中断标志 */
receive232[receive_count]=RCREG; /* 接收数据并存储 */
send232[receive_count]=RCREG; /* 接收数据存放到发送缓冲数组 */
receive_count++; /* 接收计数器加1 */
if(receive_count>7) /* 如果已经接收到8个数据 */
{
receive_count=0; /* 接收计数器清0 */
SciReceiveFlag=1; /* 置接收到8个数据标志 */
}
}
else if((0!=Send_Mode)&&(TXIF==1)) /* 中断发送数据方式且为发送中断 */
{
if(send_count>7) /* 已经发送完8个数 */
{
TXEN=0; /* 发送不使能 */
return;
}
else
{
send_count++; /* 发送计数器加1 */
TXREG=*pointer++; /* 发送当前应发送数据,发送指针加1 */
}
}
}
main() /* 主程序 */
{
INTCON=0x00; /* 关总中断 */
ADCON1=0X07; /* 设置数字输入输出口,不用作模拟口 */
PIE1=0; /* PIE1 的中断不使能 */
PIE2=0; /* PIE2 的中断不使能 */
PIE3=0; /* PIE3 的中断不使能 */
Send_Mode=1; /* Send_Mode不为0,中断方式发送数据;
Send_Mode =0,非中断方式发送数据 */
sciinitial(); /* 串行通讯初始化子程序 */
IPEN=1; /* 使能中断高低优先级 */
INTCON=INTCON|0xc0; /* 开总中断、开外围接口中断 */
while(1)
{
if(1==SciReceiveFlag) /* 是否接收到8个通信数据 */
{
SciReceiveFlag=0; /* 清接收到8个通信数据标志 */
if(0!=Send_Mode) /* Send_Mode不为0,中断方式发送 */
{
send_count=0; /* 发送数据计数清0 */
pointer=&send232[0]; /* 发送指针指向发送数据数组首地址 */
TXREG=*pointer++; /* 发送第一个数据后,将发送指针加1 */
TXEN=1; /* 使能发送 */
}
else /* Send_Mode =0,非中断方式发送数据 */
{
pointer=&send232[0]; /* 发送指针指向发送数据数组首地址 */
for(i=0;i<8;i++)
{
TXREG=*pointer++; /* 发送数据后,将发送指针加1 */
while(1) /* 等待发送完成 */
{
if(TXIF==1) break; /* 等待发送完成 */
}
}
}
}
}
}
参考文献
[1] Microchip Technology Inc. PIC18FXX8 Data Sheet.2003.



评论