
使用追踪电源来提高信号链性能
本文阐述了直流偏置电源对敏感模拟应用中所使用运算放大器 (op amp) 产生的影响,此外还涉及了电源排序及直流电源对输入失调电压的影响。另外,本文还介绍了一种通过线性稳压器(一般不具有追踪能力)轻松实施追踪分离电源的方法,以帮助最小化直流偏置电源带来的一些不利影响。
本文引用地址:http://www.amcfsurvey.com/article/285055.htm在许多运算放大器电路中,直流偏置电源会影响运算放大器的性能,特别是在与高位计数模数转换器 (ADC) 一起使用或者用于敏感传感器电路的信号调节时。直流偏置电源电压决定放大器的输入共模电压以及许多其他规范。
在上电期间,必须协调直流偏置电源的顺序来防止运算放大器锁闭。这样会毁坏、损坏或者阻止运算放大器正常运行。本文解释了追踪电源对运算放大器的重要性,并介绍了一种利用通常不具有追踪能力的线性稳压器轻松实施一个追踪分离电源的方法。
给一个运算放大器供电有两种常见方法。第一种也是最简单的一种方法是使用一个单一正电源,如图 1 (a) 所示。第二种方法是使用一个分离(双)电源(如图1 (b) 所示),其同时具有一个正电压和一个负电压。这种分离电源在许多模拟电路中都非常有用,因为它允许包括零电压电位的输入信号或者在正与负之间摇摆的输入信号。
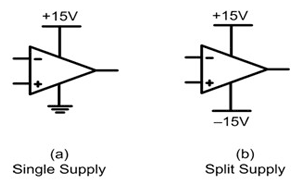
图 1 运算放大器供电选项
不管使用哪一种方法,输入共模电压都由电源电压决定。输入共模电压只是两个电压的算术平均数。方程式 1 可用于计算输入共模电压,其中 VP 为正电压轨的值,而 VN 为负电压轨的值。
就一个单电源系统而言,VN 始终为零,因为运算放大器的负电源轨连接到接地电位。
利用图 1 所示数值,单电源运算放大器具有一个 7.5V 的输入共模电压,而分离电源运算放大器有一个 0V 的输入共模电压。
一些运算放大器可以工作在单电源结构也可以工作在分离电源结构中。一些运算放大器甚至可以同非对称分离电源(VP 大小与 VN 不等)一起工作。所有情况下,设计人员都需要验证运算放大器是否能够支持期望的电源配置结构。
另外,许多运算放大器都具有使用分离电源的特点。因此,如果一个运算放大器专为单电源结构中分离电源运行而设计,则可能会存在一些性能差异。
使用对称分离电源时,正负电压必须互相追踪,特别是在电路初次上电时。追踪电源是一种调节其输出电压至另一个电压或信号的电源。对于大多数运算放大器而言,正电源电压与负电源电压始终应该大小相等而极性相反。
另外,您也可以对负电源进行调节,使其与正电源大小相等而极性相反。两种方法都会产生相同的上电波形。
如果两个电源并非大小相等而极性相反,则运算放大器可在上电期间锁闭。锁闭可能会毁坏、损坏或者阻止运算放大器正常运行。
图 2 显示了一个典型运算放大器电源电路的示意图。此处,一个开关电源提供一个正 18V 和一个负 18V。两低压降 (LDO) 线性稳压器进一步将 ±18V 调节至 ±15V。该 LDO 一般安装在电源和运算放大器之间,旨在降低开关电源产生的高频开关噪声。LDO 具有较高的电源抑制(以比率表示,PSRR),其减弱了宽带频率下 LDO 输入的噪声。
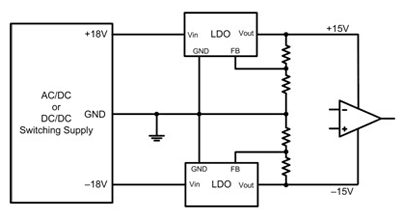
图 2 运算放大器的典型电源结构
这样可帮助向运算放大器提供低噪声电源。运算放大器还具有自己的 PSRR,其一般在 80dB 以上。然而,运算放大器仅在数千赫兹带宽时具有高 PSRR,因此 LDO 用于提供高达数百千赫兹带宽的高 PSRR。
图 2 所示电路本身没有追踪能力。在上电期间,无法保证每个 LDO 与另一个 LDO 大小相等而极性相反。上电期间每个 LDO 的输出电压都由所有软启动电路、限流、负载电容、负载电流以及输入电压决定。
因此,在启动时两个电压大小不同而极性也不相反是有可能的。另外,LDO 上电并提供稳态的 DC 输出以后,它们仍然有可能大小不等,因为每个 LDO 都具有其自己的输出电压精度,而且反馈电阻会因其容差而稍微不同。
除上电期间的锁闭问题以外,如果每个电源的最终工作 DC 电压随时间而变化,则电源会对系统性能产生影响。电源输出会因线电压、负载电流变化和温度变化而不同。电源输出会在其精度规范内有所不同,其一般为额定输出电压的 3% 到 5%。
尽管这些电源电压的变化很小,但却会改变运算放大器的输入共模电压点,其通常被建模为运算放大器输入的额外补偿电压。因为运算放大器有高 PSRR,因此建模补偿电压等于输入共模电压变化值除以运算放大器的 PSRR。方程式 2可用于计算电源变化引起的运算放大器输入的补偿电压。
方程式 2 所示 PSRR 以分贝表示,其可在大多数运算放大器产品说明书中找到。方程式 2 给出了以运算放大器输入为参考的补偿电压。用方程式 2 所得结果乘以运算放大器增益,运算放大器输出可参考补偿电压。
由于运算放大器的 PSRR 进一步降低了电源的微小变化,因此您可能会错误地得出如下结论:电源电压的微小变化在系统中影响极小或者没有影响。作为一个定量举例,我们可对一个全差动运算放大器进行分析,其将信号缓冲至一个 24位 ADC。
图 3 显示的是一个使用全差动运算放大器的简化示意图,例如:OPA1632,其配置为一个为 24 位 ADC(例如:ADS1271)提供信号的单位增益缓冲器。该电路是 ADC 评估电路板的简化示意图。运算放大器由 LDO 供电,其线压、负载和温度精度为 3%。LDO 的输出电压针对 ±15V 标称值进行配置。
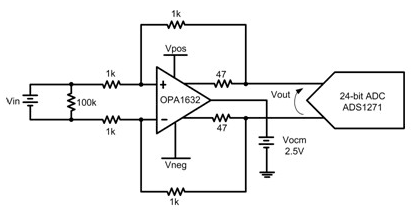
图 3 计算补偿误差影响的示例电路
如果每个 LDO 的输出电压均恰好各是 +15V 和 -15V,则共模输入电压刚好为 0V。就本例而言,如果零伏在其输入上,则我们自 ADC 读取零计数。那么,电源大小相等而在运算放大器输入上没有信号的情况下,您会从 ADC 读取零计数。
然而,假设正电压 LDO 输出增加 3%,仍然没有超出 LDO 规范。使用 15V 输出时,这 3% 的变化等同于电源电压从 450mV 上升到 15.45V。根据数据表,运算放大器的典型 PSRR 为 97dB。
方程式 2 现在可用于计算运算放大器输入的失调电压。在运算放大器输入有一个额外的 3.178μV 失调电压。由于运算放大器被配置为一个单位增益缓冲器,因此该 3.178μV 也存在于输出,并施加于ADC。ADC 的满量程输入范围为 ±2.5V,因此每个 ADC 位相当于 298nV。
使用电源产生的补偿电压,ADC 现在读取 11 个计数,而非零计数。电源在读取 ADC 计数中引入了一个 DC 补偿误差。该误差会因 LDO 输出电压而不同,而 LDO 输出电压又随时间、温度、负载电流和输入电压而变化。这便使得这种误差难以通过校准去除掉,也让 ADC 的低四位变得不确定。
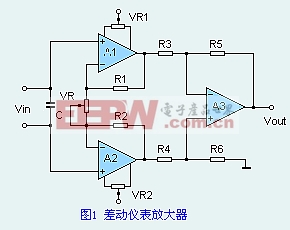
提高 LDO 追踪和精度(或者漂移)性能的一种简单方法是将图 2 所示电路修改为图 4 所示电路。附加放大器 U1 和四个电阻需要针对 2 增益进行配置。额定值条件下,R3 和 R4 之间的节点应为零伏。因此,R1 的值必须等于 R2,而 R3 的值必须等于 R4。
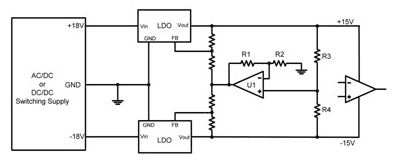
图 4 添加追踪的电路。
图 2 中,每个 LDO 的反馈网络都连接至接地。图 4 中,反馈电阻连接至接地,且由 U1 的输出驱动。现在,如果任何电源改变其输出电压,则差异出现在 U1 的非反相输入上,并被增益至原来的 2 倍。由于 U1 的输出同时驱动两个 LDO 反馈网络,因此同时对两个 LDO 实施校正以强制其输出大小相等。
必须注意图 4 所示电路。U1 的输出可驱动至接近或者等于为 U1 供电电源轨的电压。如果使用输入源的 ±18V 为 U1 供电,则输出可驱动至高达 18V 的电压。该 18V 输出应用于 LDO 的反馈引脚,其可能超出其绝对最大电压额定值。我们可以添加钳位二极管,在 LDO 的高动态负载环境下、短路条件下或者上电期间保护 LDO 反馈引脚。
图 5 显示的是加装追踪电路和保护二极管的 LDO 示意图。为了让示意图更易于理解,U3 的每个电源轨的 10 μF 旁路电容器都已脱去不用。
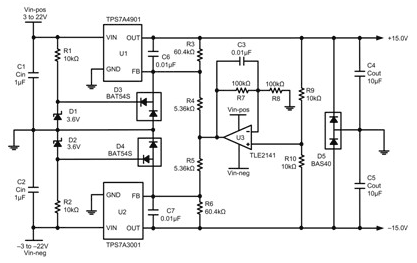
图 5 带电压保护的 LDO 追踪电路
图 5 所示电路使用一个如 TPS7A3001 等可调节、负输出电压 LDO 线性稳压器,以及如 TPS7A4901 等可调节、正输出电压 LDO。U3、R7-R10 和 C3 均为增加的组件,用于追踪。R1、R2、D1-D5 均为增加组件,用于将反馈引脚的电压控制在其各自产品说明书额定的绝对最大电压范围内。
所有其他组件一般都是为了支持 LDO,例如:输入和输出电容以及反馈电阻。所示 LDO 可支持 ±36V 范围的输入电压,但由于TLE2141运算放大器的建议电压极限,该电路的输入电压降低至 ±22V。可以选择更高电压的运算放大器,以覆盖 LDO 完整的 ±36V 输入范围。
在两种 LDO 反馈控制方案中,追踪电路都形成了一个附加电压环路。所增加的运算放大器 U3 的带宽需要由 C3 降低,以维持系统稳定性。U3 带宽需要至少为最低 LDO 电压环路的 1/10。这就意味着 U3 一般只会有几千赫兹的带宽。因此,它将不会加到系统的高频 PSRR。LDO 的 PSRR 主要决定系统的高频 PSRR。
总结
本文的讨论明显地说明了 DC 偏置电源如何影响运算放大器的一些性能参数。使用本文提供的方程式,可实际测得和计算得到这些影响的大小,以确定其在模拟系统中的影响。此外您还可以了解到,添加一些附加组件来为运算放大器构建一个追踪电源可以减少输入补偿电压的多少,可以建立正确序列来减少锁闭问题的发生,还可以提高用于运算放大器 DC 偏置电源的线性稳压器的整体电压精度。


评论