
基于LabWindows/CVI的舵机负载模拟系统设计
地面半物理仿真试验是飞机设计与研制过程中不可或缺的一个环节,用于在地面环境对飞机的工作状态进行模拟,以验证飞机的各项性能是否满足设计需要,该环节对保障飞机的安全性与可靠性具有重要意义。
本文引用地址:http://www.amcfsurvey.com/article/270763.htm舵机是飞机自动驾驶仪或飞机增稳系统中的执行机构,属于飞机的关键部件。在飞机地面半物理仿真试验中,需要在地面环境中模拟舵机在全飞行剖面中所受到的气动载荷,进而为整机提供与实际飞行相近似的工作状态,以检验舵机及其他部、组件的性能,并为全机研制、改进与改型提供重要参考依据。
因此,舵机负载模拟是地面半实物仿真试验中不可缺少的重要技术环节。在试验过程中,舵机负载模拟系统需要对负载模拟器进行控制,根据给定的载荷谱为舵机施加相应的载荷。由于在飞机飞行过程中,各个环境参数不断变化,所以舵机负载模拟系统具有载荷类型复杂且变化快等特点,控制难度较大。文中采用上、下位机的分布式结构方案,基于LabWindow/CVI开发环境设计了负载模拟系统控制软件,对多个通道的舵机载荷进行实时模拟,保证了地面模拟试验的真实性与准确性。
1系统硬件设计
1.1系统结构原理
负载模拟系统由加载作动筒、电液伺服阀、控制器与传感器等组成。其中伺服阀与加载作动筒为舵机作动器施加额定负载;拉压力传感器为负载模拟系统提供反馈信号,完成闭环控制;位移传感器用于超差检测和故障判断并为系统提供补偿。单通道负载模拟系统结构如图1所示。
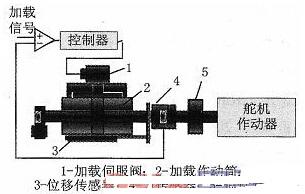
图1 单通道负载模拟系统结构图
整个试验平台中共有5个舵机,所以系统共需要五个负载模拟通道。为了达到最佳控制效果,系统采用上、下位机的分布式控制系统结构。其中上位机用于完成人机接口和协调管理等功能。由于系统中有四个负载模拟通道间存在一定耦合,故采用1#下位机对这四个通道进行协调控制;另一个负载模拟通道的负载频率较高,为保证控制精度,采用2#下位机单独进行控制。整个舵机负载模拟系统的硬件系统结构框图如图2所示。
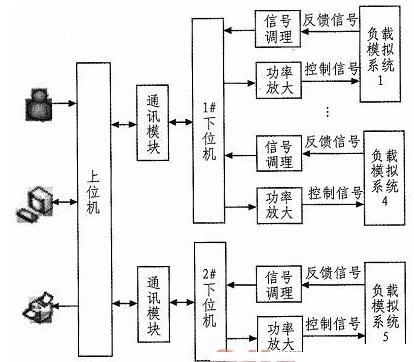
图2 系统硬件结构图
1.2系统电气连接
系统电气部分的前向通道负责将现场的信号实时采集处理并传回工控机。每个通道包含一个拉压力传感器和一个位移传感器,全部四个通道共计8路反馈信号。反馈信号在现场端通过幅值放大与零位调整后由电缆传输至电气柜的信号调理板,经阻抗隔离和滤波后输入到相应下位机的A/D转换卡,并在工控机中完成相应的数据运算与处理。
系统电气部分的后向通道负责将工控机的控制信号传送至现场的执行机构。每个通道包含一个舵机指令信号、一个加载伺服阀指令信号和一个用于对系统进行保护的开关信号,全部四个通道共计12路控制信号。控制信号从工控机的D/A转换卡或DO接口卡输出,通过功率放大后输送至现场的执行机构处,完成现场机构的控制。
由于系统采用上、下位机分布式结构,为了实现上、下位机之间的通讯,采用了基于RS-485通讯方式的异步并行通讯卡。该通讯卡基于ISA总线,以两块为一组,配合完成通讯。同组的两块板卡使用CBL-M25M9x2数据通讯线进行连接。

模拟信号相关文章:什么是模拟信号
电子负载相关文章:电子负载原理








评论