
采用ATMEGA16单片机设计的两轮自平衡电动车
近两年来,在公共场合常常能见到一种叫做体感车(或者叫平衡电动车)的代步工具,由于其便捷灵活,使得其颇为流行,并被称为“最后一公里神器”。其运作原理主要是建立在一种被称为“动态稳定”的基本原理上,也就是车辆本身的自动平衡能力。以内置的精密固态陀螺仪来判断车身所处的姿势状态,透过精密且高速的中央微处理器计算出适当的指令后,驱动马达来做到平衡的效果。
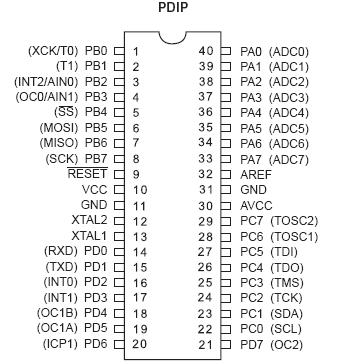
本文引用地址:http://www.amcfsurvey.com/article/268340.htm下文采用AVR Atmega16芯片作为主控制芯片,设计制作了两轮的自平衡电动车。文中分析了测量角度和角速度传感器的选择,通过Atmega16单片机多路信号AD采集陀螺仪和加速度计的信号,经过Kalman滤波算法计算动态的角度和角速度,通过LCD1602显示角速度和角度的值、转向值。利用PID控制算法控制自平衡车的平衡状态,使车体在平衡位置稳定。利用大功率MOS管设计驱动电路,通过单片机有效地控制电机的转速、电机的转向,从而有效地控制自平衡车的前进、后退及转弯功能。我们来看看具体的设计细节吧。
1研究意义
随着科学技术水平的不断进步,交通工具正朝着小型、节能、环保的方向发展,“电动车”正是在这个背景下孕育而生并为人们所熟识。据不完全统计,我国的电动车保有量已超过1.2亿辆,是增长速度最快的交通工具。随着石油储量的不断减少和人们环保意识的增强,“电动车”无疑将成为未来交通工具的主力军。就目前而言,电动车的种类主要有电动自行车、电动摩托车和电动汽车。由于电动机制造水平的提高,尤其是大功率直流无刷电动机制造工艺的成熟,带动了电动自行车和电动摩托车行业的飞速发展。同时,人们也根据两轮自平衡机器人工作原理,设计出了一些新式电动车——两轮自平衡电动车。它是一种新型的交通工具,它一改电动自行车和摩托车车轮前后排列方式,而是采用两轮并排固定的方式,这种结构将给人们带来一种全新的驾驭感受。两轮自平衡电动车仅靠两个轮子支撑车体,采用蓄电池提供动力,由电动机驱动,采用微处理器、姿态感知系统、控制算法及车体机械装置共同协调控制车体的平衡,仅靠人体重心的改变便可以实现车辆的启动、加速、减速、停止等功能。两轮自平衡车主要是绿色环保。电动车使用电池作为动力能源,并可以反复充电使用,大大减少了对环境的污染。转弯半径为零,在小空间范围内可以灵活运动。无刹车系统,由CPU自动给出正反转力矩,从而达到快速稳定的刹车效果。
控制极其方便,前进后退自如。两轮自平衡电动车是一个高度不稳定的系统,其动力学方程是一多变量、严重不稳定、耦合、时变、参数不确定性的非线性高阶方程,加上运动学方程中的非完整性约束,要求完成的控制任务也具有多重性,因此,两轮自平衡电动车作为一个具体的复杂系统,给控制理论提出了很大的挑战,是检验各种控制方法处理能力的典型装置。两轮自平衡电动车作为一种研究装置,可进行不确定性系统控制、非线性系统控制、自适应控制、智能控制等研究。
2系统总体设计方案
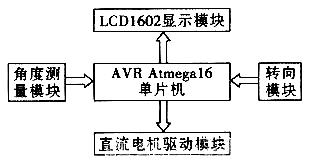
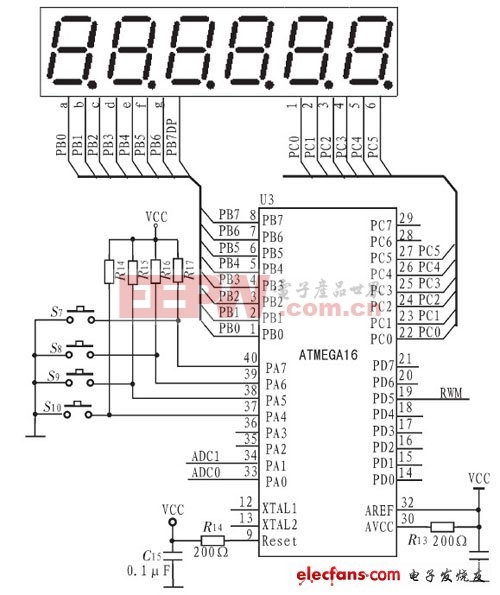
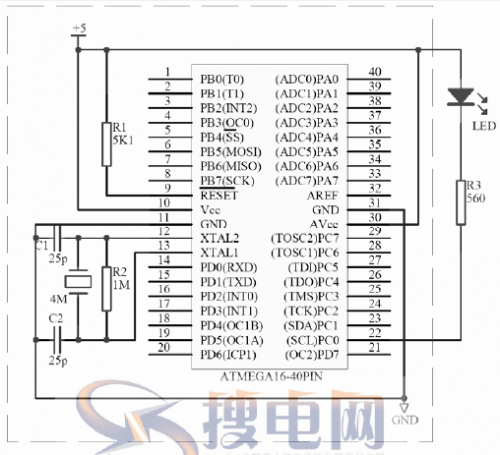
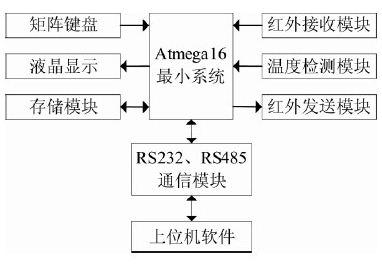
两轮自平衡自动车采用AVR Atmega16芯片作为主控制芯片,选择外部16 MHz晶振,使用JTAG仿真器进行实时仿真与调试;采用LCD1602显示转弯角度传感器测量的动态角度和角速度,为了让调试的过程中更加直观。动态角度和角速度的测量通过陀螺仪测量角速度,三轴加速度计测量角度。由于平衡车是运动的,所以三轴加速度计测量的角度里面参杂动态角度,最终通过卡尔曼硬件融合电路精确地测量出动态的角度和角速度。转向模块采用高精度电位器,当手把向右偏转时,两轮车向右转,当手把向左偏转时两轮自平衡车向左转弯,可以实现原地转弯。电机采用直流减速电机,主要是因为直流减速电机能耗低、性能优越、减速机效率高达95%以上,而且振动小、噪音低、节能高、选用优质段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理。节省空间,可靠耐用,承受过载能力高,经过精密加工,确保定位精度,扭矩大。电机驱动模块采用大功率MOS管,由于电机的功率大,需要的电流大。电机的转动通过PID控制算法,实现两轮车的自平衡状态。系统简易硬件结构框图如图1所示。
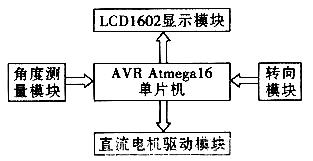
图1系统简易硬件结构框图
2.1车模直立控制方案
两轮白平衡车的直立是通过负反馈来实现的,但是两轮自平衡车的直立相对木棒的直立是相对简单的,木棒的直立是二维的而自平衡车有两个轮子着地且直立是一维的。所以通过控制轮子的转动,抵消倾斜的趋势便可以很好地保持车体直立。两轮自平衡车模型如图2所示。
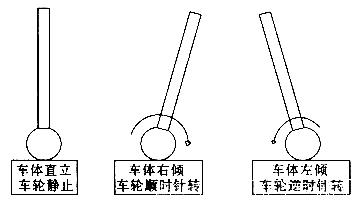
图2两轮自平衡车模型图
两轮自平衡车之所以在不加外力的情况下不能够直立,是因为车体的偏转方向和受力方向是在同一方向,所以车体会加速倒下,如果要车体直立不倒下那就需要添加外力作用才能够保持平衡状态,这个外力就是车轮对地的摩擦力。由于电机在转动时给地面一个摩擦力,根据牛顿第三定律,地面给车体一个与相对运动方向相反的作用力,这样才会不至于让车体加速倒下。
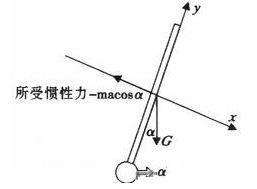
图3受力分析图
两轮自平衡车的受力分析:
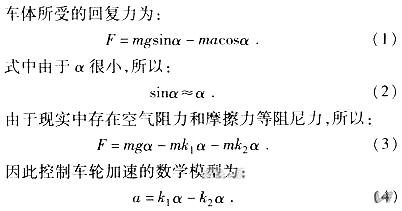
两轮自平衡车的受力分析

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理
加速度计相关文章:加速度计原理 晶振相关文章:晶振原理


评论