
第九届飞思卡尔智能车竞赛现场分析
8月22日,由教育部高校自动化类专业教学指导委员会主办,飞思卡尔公司协办的第九届全国大学生“飞思卡尔”杯智能汽车竞赛全国总决赛在电子科技大学开幕,《电子产品世界》作为大赛支持媒体在现场为大家发来第一时间的报道。笔者试图在本文中将决赛一天半时间里看到的现场情况和大家简单分析一下,希望能让大家从中对一些细节之处有所了解。
本文引用地址:http://www.amcfsurvey.com/article/262476.htm首先,今年的比赛现场算是这几年来笔者看的比较多的,先说说创意组的比赛,今年创意组分两部分,自由组的特点是比前几年炫酷了不少,因为题目没有限制,不再是说故事为主,而是炫耀智能车能做到的车技,基本上高速甩尾、交叉追逐、过倾斜赛道甚至高速翻转都是现场观赏性极强的特技。值得肯定的是,哈尔滨工程大学的水上智能车算是结合了该校的一些舰船方面的优势,而最具观赏性的是哈工大用飞轮实现的单边双轮行驶和单轮小车保持平衡,还有一些特种的类似变形金刚的特种车辆也让人眼前一亮。
创意赛指标组今年的赛果不太理想,全虚线赛道和指示灯控制着实难坏了很多参赛队,在降低难度的前提下,总算有两只球队勉强完成既定任务。分析原因,很有可能是摄像头的分辨率不足以应付要求,采用竞速赛的摄像头默认分辨的黑白赛道还是可以应付的,但涉及到彩色信号灯之后,就没那么容易满足了。加上全程虚线赛道,会产生某些时刻的瞬间判决问题,比如有些队伍对付信号灯没有问题,但几次都在交叉的S弯道出现问题,很可能是因为需要应对两重判决造成的控制力不足造成的。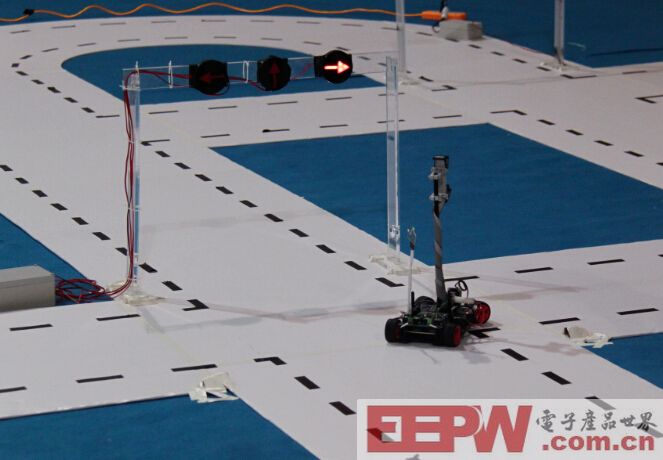
创意指标组
关于竞速赛,今年三个组是摄像头组直立跑,其他两组正常跑。最大的特点是全国预赛增加了障碍,而障碍带来的最直接影响是电磁组必须增加摄像头判断障碍。全国决赛增加了锐角的V字弯道,事实证明,这个弯道的影响还是很大的。今年的赛道特别是决赛赛道基本是一样的,只是电磁组没有V字弯,从赛道的情况来看,今年的弯角特别多,几乎没有什么大直道,而且很多弯的曲率特别怪,需要不停的变化曲率过弯,对赛车的整体调教功力考验很大。另一个共性问题是,坡道的上下坡度是不一样的,特别是下坡很陡,很多赛车可能算得上有点飞过去的,这就造成了赛车的稳定性不好,加上基本过了坡道就是发卡弯,所以,折戟这个地方的赛车也不少。特别是光电组下坡的地方被砸出来好几个坑,直接导致预赛第一的车队就因为下坡过猛影响速度,最后以0.03秒之差屈居第二。
光电和摄像头组赛道
冲下来的小车
光电组赛道下坡处最后伤痕累累
先说电磁组,电磁组整体速度是最快的,今年电磁组也不再受赛道限制,选手的小车只需在全程的7个标记点让赛车保持在标记范围内即不算违例,当然,鉴于磁导线还是在赛道正中,出赛道的情况还是不太常见的。预赛和决赛的区别是决赛赛道有了坡道,不过这对赛车来说问题不大,但是在电磁组中,预赛和决赛的比赛情况是决赛里障碍的影响更大,大概是因为决赛的障碍有两个,更重要的是赛道的分布,特别是之前的弯道的影响。预赛的障碍前面的弯道角度小,所以过弯速度慢,决赛的弯道角度大,过弯的速度就会更快,因为电磁组赛车都比较长,所以躲避起来更难。从现场的情况看,决赛中至少四分之一队伍都是在第一个障碍处出过问题,大概只有2-3辆小车是在坡+弯道后的障碍没有通过。其他的地方对比赛的影响不大,虽然今年赛道整体弯道很多很急,但是影响对电磁组不大,冲出赛道的次数不是很多,电磁组的完赛比例相对是最高的。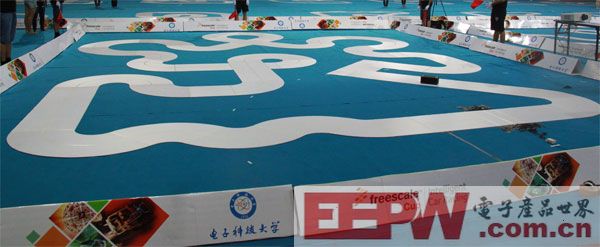
电磁组预赛赛道
电磁组决赛赛道全貌
电磁组预赛赛道障碍
电磁决赛赛道障碍分布
摄像头相关文章:摄像头原理








评论