
基于视觉体感双平衡的防晕动系统
摘要:本项目深入分析了日常生活中晕车晕船等晕动病的发病原因,开创性地从体感和视觉两个方面对晕动病进行预防和缓解。以Intel Galileo和BayTrail平台为核心,同时控制三自由度平台的平衡和稳定摄像头采集的图像,实现了体感和视觉的双平衡,从而屏蔽了外界倾斜和晃动对乘客的影响,更为乘客带来了娱乐舒适、丰富多彩的旅行体验。
本文引用地址:http://www.amcfsurvey.com/article/262227.htm创意来源
每次乘坐公交车出行,身边的同学总是被司机的各种转弯、刹车和加速搞得头晕目眩。
我们查阅了大量资料,了解到生活中俗称的晕车、晕船等现象,医学上称之为晕动病,为一种平衡失调的疾病。当人眼所见到的运动与身体前庭系统所感觉到的运动不相符时,人就会有昏厥、恶心、食欲减退等症状出现。呕吐反应是由中枢神经系统中的呕吐中心与内耳前庭系统对抗引起的生理反应。和一般的病症不同,晕动病导致的恶心并不会在呕吐后得到缓解。
许多治疗恶心和呕吐的药物在某些情况下很奏效,但是却无法根治晕动病,而且效果不佳且存在副作用。
在我们乘坐地铁和轻轨转弯的时候,我们可以观察到外面的景象发生了倾斜,而人体没有产生离心力带来的晃动感。我们思考如果能够将轨道交通的这种方案运用到其他交通工具中去,这将给身边那些晕车晕船的人带来巨大的福音。
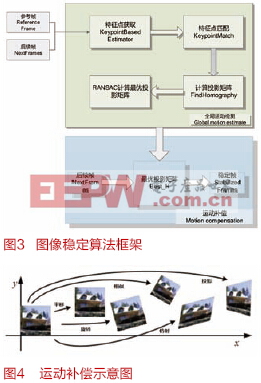
然而,轨道交通依赖于其固定的线路和预定的速度计算出其在每个点精确的倾角,在其他交通工具上,速度和倾角都是实时变化的,因此需要有传感器和执行机构实现系统的实时平衡。同时,我们还需要配合自稳平台呈现出稳定的图像到头戴显示设备。
关键技术
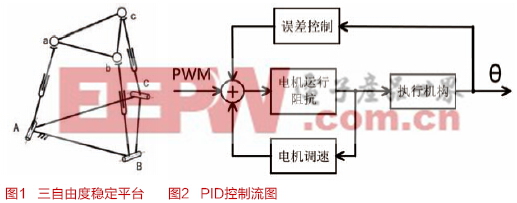
1. 三自由度机械结构
为了实现平台稳定,我们使用了三自由度机械结构来实现体感平衡。因为此结构为多支杆并行支撑,所以稳定性很高,另外三自由度的控制度很高,因此很适合用作我们的稳定平台。

pid控制器相关文章:pid控制器原理











评论