
笔记本电脑借助通用GPS RF前端实现软件基带处理
只要判定变量超过一定的门限,系统就以为成功地实现了捕捉,继而进进跟踪模式。否则,就通过调节本地PRN序列的相对相位和振荡器频率,来更新判定变量,并重复上述过程。
串行搜索方法的简单逻辑结构使它非常适适用ASIC实现,而用软件实现就不切实际了,由于搜索空间非常大。假设系统答应500Hz的载波频率偏移,多普勒频率是10kHz,软件实现需要的搜索空间大概为
另外一种更简单的软件捕捉方法叫做频域并行代码相位捕捉。这种方法将多普勒频率和代码相位搜索合并起来,在经过PRN码的快速傅立叶变换(FFT)后,将所有代码相位信息转换到频域内。这样我们只需要搜索多普勒频移上的空间即可,因此这是一种快速高效的软件搜索方法。
首先,将输进信号与本地正弦和余弦载波(同向I和正交Q信号分量)分别相乘。然后把I和Q分量合并成一个复合信号输进到FFT模块。傅立叶变换的结果再和 PRN码的FFT变换结果相乘(PRN天生器产生代码相位为零的代码)。实际上,FFT运算和PRN码的产生可以采用列表的方法,以降低运算的复杂性。
最后,输进信号与本地代码的乘积(该乘积代表了输进信号和载波频率的相关性)被送到傅立叶逆变换模块,该模块的自乘输出结果再被反馈到判定逻辑。基于 FFT的频域计算被证实具有较小的运算量。例如之条件到的那个例子, 捕捉运算的复杂性大概为20,000/500 = 40次FFT运算操纵。
串行搜索方法具有简单的逻辑和控制架构,非常适合ASIC实现。然而,巨大的搜索空间增加了软件算法的复杂性。所以对于软件GPS接收机来说,串行搜索方 法并不是一个好的选择。相反,并行代码捕捉方法的低复杂性使它很适适用软件实现。然而,它的逻辑架构远比串行搜索方法复杂,因此很难用ASIC实现。
跟踪细调
捕捉过程建立了对GPS信号的频率和代码相位参数的粗校准。因此,跟踪的目的是进行细调,以便系统能用精确的代码相位和频率信息解调出数据。跟踪包括代码相位跟踪和载波频率跟踪。
代码跟踪用延时锁相环(DLL)实现,如图2所示。DLL电路把输进信号乘以PRN码的三个复制码(间隔±0.5码片),这三个复制码分别代表和输进信号相比提前、准时和落后到达。经过综合后,这些信号分别代表输进信号和本地复制码之间的相关性。具有最高相关值的信号被选中保存下来(图3)。
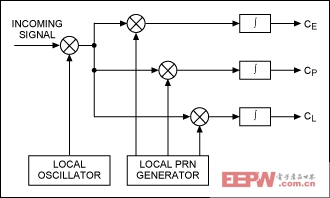
图2. 使用延时锁相环作代码跟踪帮助细调,以便系统能用精确的代码相位和频率信息解调出数据。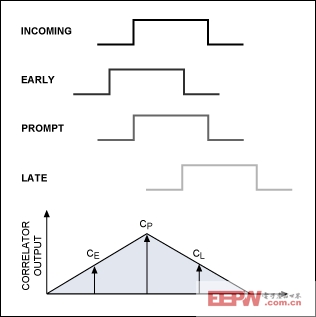
图3. DLL电路把输进信号乘以PRN码的三个复制码(间隔±0.5码),这三个复制码分别代表和输进信号相比提前、准时和落后到达。具有最高相关值的信号被选中保存下来。

波段开关相关文章:波段开关原理









评论