
基于DSP的移动机器人设计与实现
智能车辆的导航与定位、自动驾驶与控制和车辆的预警防碰等智能交通系统关键技术的研究,近年来受到国内外越来越广泛的关注,也取得了丰硕的成果。但真正的实验研究还是很少,基本上只进行了仿真试验。鉴于理论上的模拟和实际应用情况可能相差甚远,选择了具有智能性、易扩展性和移动性等优点的车型移动机器人作为ITS关键技术的研究平台中的主要部分——车辆模拟器。
本文所阐述的移动机器人SJTNC-1,就是面向ITS提出的。考虑到关键技术研究中需进行大量的计算,如模糊控制、卡尔曼滤波和路径导引等,并且系统对数据的实时性要求很高,所以采用数字信号处理器(DSP)作为移动机器人主控CPU。
1 TMS320LF2407A简介
TMS320LF2407A(以下简称F2407)是TI公司在TMS320系列DSP的基础上,专为数字电机控制而设计的。除了具有一般DSP的改进的哈佛结构、多总线结构和流水线结构等优点外,它还采用高性能静态CMOS技术,电压从5V降为3.3V,减少了功耗。并且指令执行速度提高到40MIPS,几乎所有指令都可以在25ns的单周期内完成。如此高的运算速度使其可以通过采用高级控制算法如模糊控制、卡尔曼滤波以及状态控制等来提高系统的性能。而且,它具有电机控制应用所必需的外设,如:32K片内FLASH、2K单访问RAM、串行外设接口(SPl)、串行通信接口(SCl)、两个事件管理模块、16通道双10位A/D转换器和CAN控制器模块。
2 移动机器人的运动机构
考虑到该移动机器人是面向ITS的,所以采用的是车型结构(四轮结构)。前两轮通过减速比为8:1的齿轮减速机构与转向电机进行连接,实现移动机器人的转向功能;后两轮通过减速比为6:1的齿轮减速机构与驱动电机进行连接,实现移动机器人的驱动。电机的选型可根据实际情况选择小型步进电机或小型直流电机。这里选用的是瑞土Minimotor公司生产的直流电机,这种电机具有体积小、转矩大等特点。
3 移动机器人控制系统
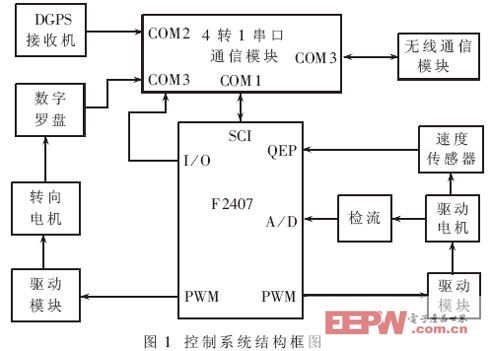
控制系统以控制器F2407为核心,由无线通信、电机驱动、速度传感器、数字罗盘、差分GPS(DGPS)接收机和4转1串口通信模块等组成,如图1所示。无线通信模块根据自行约定的通信协议接收上位机的规划好的路径信息,整个控制系统通过控制驱动电机和转向电机使移动机器人跟踪该路径行驶。电机采用PWM调速方式,其中驱动电机采用双闭环(速度和电流)PID控制策略,而转向电机则通过把数字罗盘的航向信息作为转向的反馈量进行PID控制。整个控制系统把DGPS接收机的位置信息作为系统的位置反馈信息,用以完成整个系统的位置闭环控制。
MC35是德国西门子公司生产的可二次开发的支持GPRS的双频GSM模块,可以通过标准串口与PC机相连。本系统用MC35作为移动机器人与上位机的通信模块。它具有GPRS技术带来的一切优点,如一直在线和提供高速价廉的数据传送服务等。该产品的特性如下:
·支持双频:EGSM900/GSM1800
·支持GPRS Class8协议
·支持数据、语音、短消息和传真服务
·采用电路交换方式,最大传送速率为14.4kbps
·支持的电压范围:8V~30V
·采用标准工业接口
·体积:65mmx74mmx33mm
·重量:130g













评论