
DSP并行处理在剖面声纳系统
1 剖面声纳系统工作原理及结构
1.1 剖面声纳工作原理
剖面声纳工作在主动方式时,发射换能器垂直于被测海底发射一束圆锥形波束,声波到达海底表面时,一部分能量被反射回来,产生一个很强的回波,另一部分能量透射进入海底内部,在海底内部继续向深处传播。由于海底内部介质不连续(如海底的岩石、石油管线等),各介质产生的回波能量,一部分被固体物质散射而损耗,另一部分则反向散射回换能器,这部分回波包含了海底内部介质的不连续信息。因而可以根据海底介质的内部回波很好地反映出海底内部掩埋物体分布情况。根据机器人载体平行于海底运动,换能器所接收的信号经过接收机的处理传输到水上主机重建出海底内部剖面的二维结构图,再根据机器人的测高、测距及定位声纳及后续处理便得到被测区域的三维剖面图。
1.2 剖面声纳的系统结构
用于海底石油管线探测的多波束剖面声纳系统,既可以安装在机器人的底部,也可以悬挂于机器人的前端,具有灵活安装的特点。
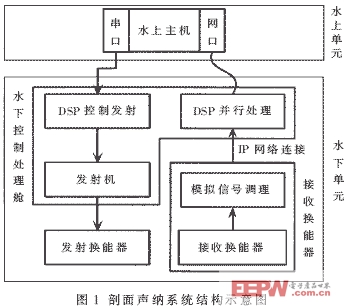
根据系统实时性和准确性的考虑,将系统分为水下和水上两个单元,中间用光缆连接。水下单元位于机器人ROV载体上,包括水下控制处理舱和换能器基阵两个部分。水下控制处理舱主要包括DSP控制发射部分、发射机以及DSP并行处理部分;换能器基阵主要包括由宽带大功率阵子组成的呈45°×5°指向性的发射换能器和具有9个阵元、每个阵元呈5°指向性的接收换能器,其中,接收换能器内部含有模拟信号调理电路板,能够将换能器的模拟信号实时地转换成数字信号并通过IP网络实时传输到水下控制处理舱的DSP并行处理单元进行相关的信号处理。水上单元主要由水上主机构成,利用其串口实时控制发射信号的功率、发射帧率、采集时刻等,通过网卡接收水下单元DSP处理数据并通过VC++显示程序进行剖面结构信息的实时显示。剖面声纳系统结构图如图1所示。
2 基于IP互连的DSP并行处理结构
2.1 流水线并行的DSP处理板结构
多波束剖面声纳系统采用35k~65kHz宽带线形调频信号进行探测,系统的采样频率为500kHz,接收9路的基阵信号,并且要求系统具有较高的探测能力,所以采集时间定为15ms以上,探测有效距离大于11米。进行海底的剖面探测时,需要对接收的多波束接收信号进行带内补偿、波束形成、频域相关算法、旁瓣抑制以及FIR滤波等处理,系统要求能够在10帧/秒以上实时显示剖面结果并且存盘。
为了满足多波束剖面声纳的高速、大容量数据的实时信号处理需求,在信号处理系统部分采用了以二片DSP TMS320DM642组成的流水线并行结构,如图2所示。
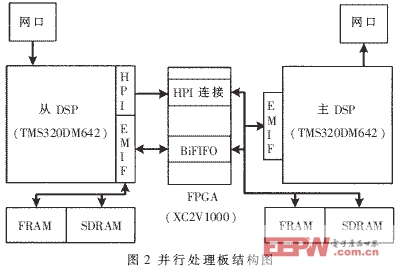
图2中,左端DSP为从DSP,通过其自身网口与接收换能器内的数据转换网络连接,根据显示速度要求,接收转换后的信号数据,并存储到其外围的SDRAM中。当接收到一帧信号数据时转入并行处理程序,左右两片DSP采用流水线并行处理方式。















评论