
基于DSP双机容错实时系统的设计
容错实时系统的研究主要集中在两个方面:① 改进实时调度算法,使之确保实时任务在正常运行和遇到错误时,均能在规定时限到来以前获得正确的输出。② 将过去应用于普通计算机系统中的冗余容错策略移植到实时系统中。
在具有硬件容错能力的计算机系统中,其失效65%来自软件,仅有8%来自于硬件。因此,软件容错能力成为决定计算机系统可靠性的关键。为了在出现硬件或软件的暂时或永久故障的情况下,保证关键任务仍能在规定的时限范围内完成运算,并输出正确的结果,提出一种双处理器实时嵌入式容错系统体系结构。该系统结构采用多处理器体系结构,实现计算机之间的通信,并无缝整合了计算机硬件、操作系统、应用软件级的软件容错设计,达到从整体上提高系统可靠性的目的。
本系统采用图1所示的双机容错系统硬件结构模型。该系统在双机比较系统的基础上,结合多处理机的松耦合与紧耦合系统结构,在不同的处理机间通过通道互连实现通信,为在硬件容错中结合软件容错提供可能。
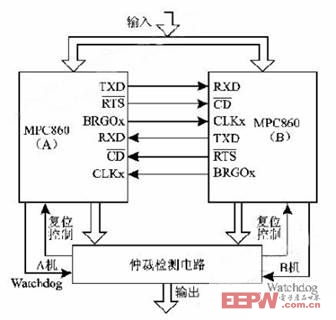
图1 双机容错系统结构模型
A机和B机各有独自的外围控制逻辑和外设,这样不会引起系统资源的竞争,增加整体系统的稳定性。当然,这样是以花费更多的硬件设施为代价的。比较器及不一致检测用专门设计的仲裁检测电路来实现,其根据A机与B机周期向其发送的自检测信号来判断A机系统和B机系统运行的状况。
双机系统的运行状态如下:
① 如果A机与B机均正常运行,则将计算机A作为主系统,计算机B作为备份使用,A机的运行结果作为系统输出,A机运行到检测点,向B机发送日志,B机更新日志列表。
② 如果A机正常而B机故障,亦将A机的运行结果作为系统输出,同时将B机的运行故障状态报告给A机,并向B机进行复位控制操作。
③ 如果A机故障,B机正常,则进行开关切换操作,B机进行系统备份任务重调度,B机运行结果作为系统输出,并向A机进行复位控制操作,在检测点更新A机日志,保持需要备份的任务状态一致。
2 软件设计与实现
图2所示模型结合嵌入式实时系统的体系结构,采用层次结构和模块结构相结合,无缝整合了计算机硬件、操作系统、应用软件级的软件容错设计。在整体上采用分层的结构模型,克服了软、硬件分离和脱节的问题,提高系统的灵活性和可移植性。模型的每一层均可以看作是一个相对独立的系统。在每一层中按照系统功能,划分不同的功能模块。
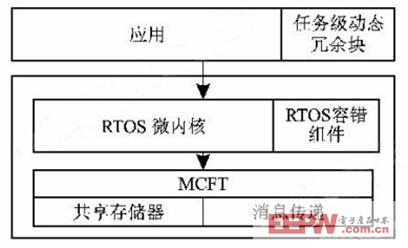
图2 双机容错系统软件体系结构
该系统采用对称结构,为支持容错处理,每个节点从下到上分为3个主要部分,即MCFT(Multiprocessor CommunicatiON for Fault Tolerance)、RTOS系统级容错组件、任务级动态冗余组件。
2.1 多机容错通信模块MCFT
在操作系统与硬件之间加入MCFT层,MCFT作为BSP(Board Support Package)的一部分,作为硬件平台的抽象层,为操作系统提供统一的界面,提高系统的可移植性。有容错需求的任务,通过MCFT所提供的功能传递日志,保持主系统和备份系统的关键任务的状态和数据一致。MCFT屏蔽了底层通信的具体实现细节,使系统的实现与连接介质无关。
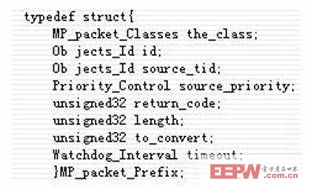
MPFT管理着一些数据包,并且在各个节点之间发送和接收这些数据包,数据包的结构如下:
2.2 RTOS系统级容错组件
RTOS系统级容错组件,包括系统内核级容错支持组件、系统自诊断组件和主/备用机切换支持组件。
(1) 内核级容错支持组件
为支持操作系统级和应用级通信,在该系统中,每个节点上保存两个对象表,一个本地任务表,一个容错任务表。本地任务表在每个节点上都是不同的,它包含在此节点上创建的所有任务。容错对象表包含系统中所有的容错任务,在所有节点上是一样的。为保持在所有节点上容错任务表的一致性,每个节点对容错对象的创建、删除等都必须通知给备份节点。利用检查点技术和传递日志法,保持主系统和备份系统的备份任务的状态和数据一致。一旦主机发生故障,系统程序自动进行主/备用机切换,备用机系统使备份任务就绪,利用实时任务的调度策略,使备份任务在备份机上发生重调度,成为主机。
(2) 系统自诊断组件
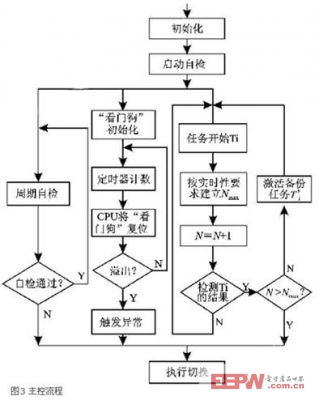
如图3所示,系统中采用自诊断的方法来诊断系统级的故障,用任务级的检测来诊断应用级的故障。
自诊断划分为几个不同的测试阶段,系统启动自检测阶段和周期自检测阶段。自动启动诊断的因素有:主/备用机定时切换和主机发生故障。周期自检测阶段根据系统需求,周期性检测外设和通信口。每个阶段对应设备的几种功能块,包括CPU的自诊断、中断响应自诊断、串口自诊断、定时器自诊断、离散量自诊断、RAM自诊断等。
由于结果比较是实时系统中任何事务处理都需要经历的步骤,因此把任务级的故障检测放到结果判别部分进行。
(3) 主/备用机切换支持组件
仲裁检测电路中对主/备用机设置了“看门狗”监视器。当主/备用机处于正常工作状态时,运行于CPU上的某一任务周期性地对“看门狗”施加复位信号,这样,“看门狗”计数器就不可能产生溢出触发信号;当CPU出现故障时,“看门狗”会输出一个离散触发信号并发出报警,此时,系统进行自动切换,让备用的系统机工作。
2.3 任务级动态冗余
在实时多任务系统中,采用另一种软件冗余方法——任务级动态冗余。任务级动态冗余方法是实时系统中瞬间故障的恢复方法之一。
在实时多任务的环境下,充分利用操作系统提供的功能,对各个基本任务建立后备任务作为冗余,并对后备任务进行容错调度,从而起到类似于重试或卷回恢复的作用。利用检查点技术和传递日志法保持主系统和备份系统的状态的一致性,实现错误恢复,有较高的性价比。
根据应用程序,结合实时性要求,采用以下的措施:
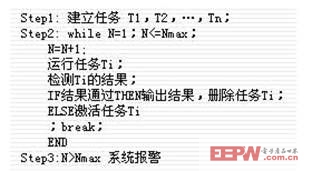
① 把应用程序分解成多个任务,任务以过程的形式出现,各个任务进入运行的顺序是从1到?n,并在每个任务的最后设置检查点,传递日志。
② 根据应用程序的要求事先给各个任务安排优先级,使得任务可以根据要求及时占有处理器,实现实时处理。
③ 为各基本任务准备一个后备任务存放在内存中,平时后备任务不建立,不占有系统资源,仅在需要时才激活使用,后备任务的优先级比相应的优先级要高。马上建立就抢占执行,是某种意义上的重试或程序卷回。
④ 为实现恢复功能的后备任务,可以和原有任务完全一样,也可以是替换算法。
下面的算法能为各个任务产生容错调度,从而实现任务冗余:

当后备任务执行了Nmax次之后还通不过检测,就认为系统出现永久故障,系统报警。Nmax是个阀门值,是由实时要求所决定的。
3 可靠性分析
在考虑了双机的切换问题(包括切入成功率,与此相关的切入时间和再次切入的时间及其故障判别问题)后,完整的双机容错系统的稳态可用度为
其中:λ为平均失效率,β为故障诊断率,是平均诊断时间的倒数;μ为平均维修率,是平均维修时间的倒数;α为加入失效率,是平均切入时间的倒数;C为故障判别率;α′为再次切入失效率,是再次切入时间的倒数(重启双工时间的倒数);D为切入成功率。
采用对称双机系统,在典型值的计算中可以获得99.99995%的可用度。
4 结论
随着实时系统在安全领域内越来越多的应用,可靠性已经成为衡量系统优劣的重要因素之一。传统的实时系统容错只满足了系统某一方面的容错需求。为了在出现硬件或软件的暂时或永久故障的情况下,系统仍能在规定的时限范围内完成运算,并输出正确的结果,本文提出一个软、硬件结合的完整的解决方案,能满足系统的强实时性、高可靠性、服务不断流的要求。此方案应用于RTEMS中,具有很高的可靠性。













评论