
DIY机器人:神通广大的核辐射探测机器人设计方案,完整流程框图
一、项目概述
1.1 引言
近期日本地震及其引发核辐射的影响,人们对地震和核辐射的危机意识进一步增强,为此本组设计并制作一个寻迹智能机器人,根据一定要求完成从出发区到辐射探测区的避障、探测、救援任务,模拟危机发生时机器人救灾情况。
1.2 项目背景/选题动机
鉴于近期日本地震及其引发核辐射的影响,本设计主要实现寻迹智能救援机器人探测核辐射及其实行救援任务,结合实际情况,模拟救援行动。
二、需求分析
2.1 功能要求
根据一定要求完成从出发区到辐射探测区的避障、探测、救援任务。
2.2 性能要求
基本要求
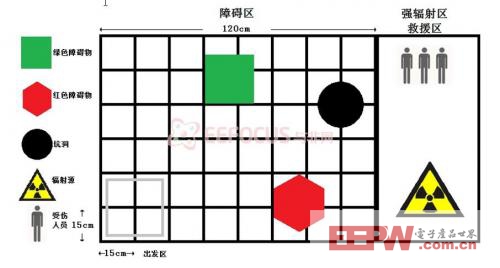
(1)机器人从出发区出发,沿引导黑线向辐射探测区前进,机器人行驶过程中不可脱离黑色引导线行驶。
(2)机器人行驶过程中遇到十字路口时发出声光指示信息。
(3)机器人行驶过程中遇到障碍物。机器人必须避开障碍通过且不得与其接触。
(4)机器人到达辐射探测区后应立即停止,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停止。
(5)到达辐射探测区后,进行核辐射探测,当辐射超标时发出报警。
(6)在搜救区看是否有生命活动迹象,若有发出声光报警。
2、发挥部分
(7)机器人前进过程中遇到红色障碍物机器人必须选择向左转避开障碍物,遇到绿色障碍物机器人必须选择向右转避开障碍物,遇到洞时掉头重走不至于掉落。
(8)机器人避开障碍物通过不得与其接触且选择最短行驶距离到达辐射探测区。
(9)能准确记录机器人通过障碍区的时间和路程。
(10)到达辐射探测区后,寻找辐射源。
(11) 当辐射源辐射量超高时,进行相应的处理。
(12) 机器人实时监控受灾地区的温湿度情况.
(13) 发现生还者后传回生还者信息。
(14) 其他。
3、说明
(1).在白纸上绘制或粘贴引导轨迹。
(2).引导轨迹宽度2cm,可以涂墨或粘黑色胶带每个方格间隔为15cm。
(3). 机器人允许用玩具改装,但不能由人工遥控,其外围尺寸不大于黑线与黑线之间宽度。
(4). 障碍物、伤员、辐射源均可按要求自由移动。
(5). 辐射源可使用夜光表(镭)等轻微辐射的矿物替代。

DIY机械键盘相关社区:机械键盘DIY










评论