
工业磁条导引送料车
2、设计的总体方案:
本文引用地址:http://www.amcfsurvey.com/article/256900.htm电路部分:
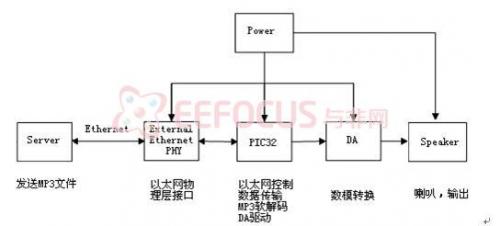
整个电路系统包括了检测、控制、驱动三个模块。首先,有单片机完成按键扫描,磁感应传感器采集磁条信号,测力传感器采集重量信号,然后送给单片机软件控制模块进行实时控制,输出相应的信号驱动电机转动和报警系统,从而控制小车整个过程的运动状态。系统方案方框图如图2所示。
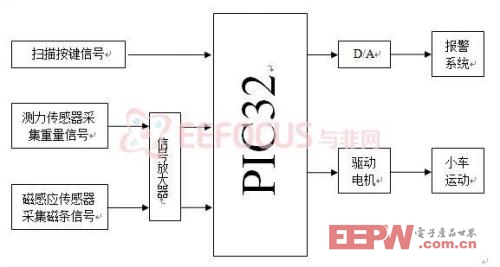
图2.系统方案方框图
系统原理:
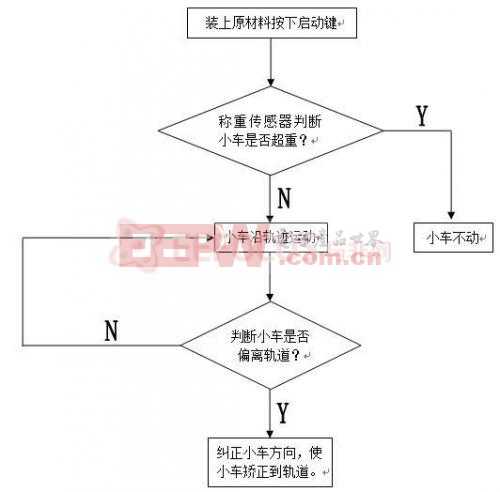
本设计采用了简单的两点式供货,即一个供货点A,一个工作点B。小车能够自动从供料点A处以一定的速度沿着磁条轨道运送原料到工作点B,当小车上的原料卸完后(即空载后)能自动沿着磁条轨迹返回A处。
小车循迹原理:
本设计采用了磁条导引方式。小车的导轨有一条磁条组成,在小车的底部,磁条左右两侧安装4个磁感应传感器,(安装位置如图3所示)不停的扫描磁条上的磁信号,用以控制小车的方向。小车前进时,始终保持在磁感应传感器1、2之间。当小车向左偏离磁条轨道时时,磁感应传感器1就能检测到磁条发出的磁信号,把检测的信号送给单片机的处理,控制系统发出信号对小车轨迹予以纠正。同理当小车向右偏离时,磁感应传感器2做出同样的动作。为了防止小车由于惯性过大而摆脱磁感应传感器1、2的检测,而无法正常纠正方向,磁感应传感器3、4作为后备检测。
重量检测原理 :
本设计选择的测力传感器为柱式力传感器,安装在车的底部(安装位置如图3所示)。柱式力传感器的内部有四个电阻应变片,当小车底部在力的作用下产生应变导致应变片的阻值发生变化,通过内部的桥式测量电路将电阻值的变化转变成电压的变化,通过对电压的测量来测量小车的载重量。当载重量超过允许值时,小车发出报警;当空载时,小车自动返回供料点。
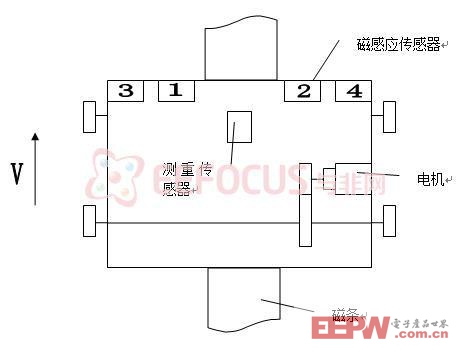
图3、传感器的安装示意图








评论