
一种新型智能清洁机器人测控系统的设计
0 引 言
移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。本文主要研究智能清洁机器人测控系统的设计与实现,最终目标是通过软硬件的合理设计,使智能清洁机器人能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
1 测控系统组成及功能
智能清洁机器人测控系统主要包括控制器核心系统、传感器系统和驱动系统等。其原理如图1所示。基于清洁机器人自身体积尽可能小的原则,本设计将控制器核心系统、传感器系统、行走驱动及相关电路集成在一块电路板上。为防止干扰,通过光电隔离器件将各模块在电气上隔离开来。利用超声波传感器、红外反射式传感器和接触传感器组成多传感器系统,检测信号经调理电路处理后送控制器;采用8位单片机SST89E554RC作为控制器,控制器对传感器信号加以判断,根据判断结果,选定相应的控制策略,并控制语音系统发出相应的报警信号;在相应的控制策略下,通过专用驱动器驱动直流电机,带动驱动轮,两轮独立驱动,实现避障功能;同时,控制器控制小型双风机真空吸尘系统对经过的地面进行必要的清扫。
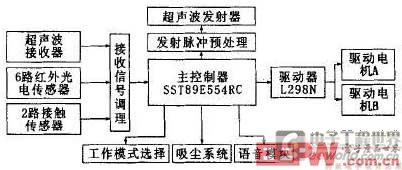
图1 系统原理
该新型智能清洁机器人实验平台如图2所示,该平台为圆形结构,两轮独立驱动,具备完整的吸尘系统和电源系统等功能模块。最终将在该平台上对本文所介绍的测控系统的性能进行实验验证。

图2 智能清洁机器人实验平台
2 测控系统硬件设计
2.1 CPU控制模块
CPU采用美国SST公司制造的8位单片机SST89E554RC。器件使用与8051完全相同的指令集,并与标准的8051器件管脚对管脚兼容。片内拥有1 kB字节RAM空间,3个16位定时计数器,4个8位I/O端口,拥有可编程计数阵列(PCA),可提供5路256级PWM调速,可通过全双工增强型串口实现人机通讯。
依据SST89E554RC单片机的引脚特性,在实际设计中,各电机驱动信号由单片机P1口输出,左右驱动电机占用P1.1~P1.6共6个端口(其中 P1.3和P1.6作为PWM调速信号输出端口使用),吸尘风机和起尘电机分别占用P1.0和P1.7口;红外反射式传感器和接触传感器检测信号分别送给 P2口的P2.0~P2.7共8个端口;超声波接收器信号经调理后送人外部中断INT1(P3.3口);2个触摸式选择屏的触摸信号经处理后分别送给 P3.4口和P3.5口。
2.2 驱动模块
直流电机所需的驱动电压、驱动电流均比较大,因此采用双H桥高电压大电流驱动芯片L298N作为电机驱动芯片。L298N是推挽式功率放大专用集成电路器件,直流驱动电流总和可达4A,其内部具有2个完全相同的PWM功率放大回路,拥有PWM调速功能。在控制电路中,考虑到单片机会受到驱动部分的干扰,因此采用了光电藕合器TLP521,把控制部分和驱动部分在电气上隔离开来。采用8个1N5822高速大电流肖特基二极管组成续流保护电路,消除电机在起停、制动及换向时产生的反电势。系统工作时,单片机P1口输出的控制信号经过驱动器芯片74HC245和光电拥合器之后输入电机驱动芯片L298N,控制电机动作。当需要调速时,只需改变PWM波(本设计中由单片机P1.3和P1.6端口产生)的占空比即可,理论上可以实现256级调速。


评论