
电源变换器中电流/电压模式相互转化分析
本文先简单的介绍了电流模式和电压模式的工作原理和这两种工作模式它们各自的优缺点;然后探讨了理想的电压模式利用输出电容ESR取样加入平均电流模式和通过输入电压前馈加入电流模式的工作过程。也讨论了电流模式在输出轻载或无负载时,在使用大的电感或在占比大于0.5加入斜坡补偿后,系统会从电流模式进入电压模式工作过程。
目前,电压模式和电流模式是开关电源系统中常用的两种控制类型。通常在讨论这两种工作模式的时候,所指的是理想的电压模式和电流模式。电流模式具有动态响应快、稳定性好和反馈环容易设计的优点,其原因在于电流取样信号参与反馈,抵消了由电感产生的双极点中的一个极点,从而形成单阶的系统;但正因为有了电流取样信号,系统容易受到电流噪声的干扰而误动作。电压模式由于没有电流取样信号参与反馈,系统也就不容易受到电流噪声的干扰。
然而,在实际的应用中,通常看似为电压模式的开关电源系统,即系统没有使用电流取样电阻检测电流信号,但也会采用其它的方式引入一定程度的电流反馈,从而提高系统动态响,如:利用输出电容ESR取样加入平均电流模式,通过输入电压前馈加入电流模式。另一方面,看似为电流模式的开关电源系统,在输出轻载或无负载时,系统会从电流模式进入电压模式。在使用大的电感时,或在占比大于0.5加入斜坡补偿后,系统会从电流模式向电压模式过渡。本文将讨论这些问题,从而帮助工程师在遇到系统不稳定的时候从理论上分析,找到解决问题的办法。
1 电压模式的工作原理
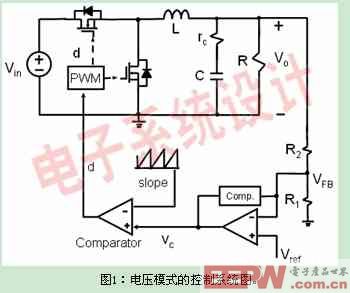
电压模式的控制系统如图1所示。反馈环路只有一个电压环,电压外环包括电压误差放大器,反馈电阻分压器和反馈补偿环节。电压误差放大器的同相端接到一个参考电压Vref,反馈电阻分压器连接到电压误差放大器反相端VFB,反馈环节连接到VFB和电压误差放大器的输出端VC。输出电压微小的变化反映到VFB管脚,VFB管脚电压与参考电压的差值被电压误差放大器放大,然后输出,输出值为VC。
电压误差放大器输出连接到PWM比较器的同相端,PWM比较器的反相端输入信号为斜波发生器的输出的连续锯齿波,由时钟同步信号产生。
每一个开关周期开始时,PWM比较器的反相端电压为0,PWM比较器输出为高电平,高端的主MOSFET导通,电感所加的电压为正,电感激磁,电流线性上升;PWM比较器的反相端电压所加的电压为时钟同步信号产生的锯齿波,电压从0开始上升。
当PWM比较器的反相端电压增加到等于电压误差放大器输出电压VC时,PWM比较器输出从高电平翻转,输出低电平,高端的主MOSFET关闭,低端的同步MOSFET或续流二极管导通,电感所加的电压为负,电感去磁,电流线性下降。下一个开关周期开始的时钟同步信号到来时,主MOSFET又导通,如此反复。
从电压模式工作原理可以看到,系统没有内置的限流功能保护电路,同时对输入和输出的瞬变响应缓慢。为了提高系统的可靠性,需要外加限流保护电路,注意到限流保护电路只起限流的作用,并不参与系统的内部的反馈调节。
电压模式为单反馈环控制系统,环路增益是输出电容ESR的函数,因此反馈补偿设计比较复杂,需要更多额外的器件仔细设计补偿环路,来优化负载瞬态响应。另外,需要电解电容或钽电容稳定控制回路以维持良好的高频响应;在相同均方根工作电流的需求下,相同电容值的电解电容或钽电容比陶瓷电容的体积更大,同时输出电压的波动也更大。同时,由于环路的增益是输入电压的函数,需要输入电压前馈。用于限流控制的电流检测缓慢不准确。如果多个电源和多个并联相位操作,需要外部电路进行均流控制。另一方面,由于电流信号不参与反馈,系统不会受到电流噪声的干扰。
电压模式的反馈设计通常取穿越频率为1/5-1/10的开关频率。环路补偿采用III类补偿网络:3个极点和2个零点 [1]。2个零点安排在L-C谐振双极点附近,以抵消双极点产生的相位延迟;低频积分电路用以提高的低频直流增益;2个高频极点以产年高频噪声衰减,保证在0dB穿越频率以上环路增益保持下降。
2 电流模式的工作原理
电流模式的控制系统如图2所示。在电流模式的结构中,反馈有二个环路:一个电压外环,另一个是电流的内环。电压外环包括电压误差放大器,反馈电阻分压器和反馈补偿环节。电压误差放大器的同相端接到一个参考电压Vref,反馈电阻分压器连接到电压误差放大器反相端VFB,反馈环节连接到VFB和电压误差放大器的输出端ITH。若电压型放大器是跨导型放大器,则反馈环节连接到电压误差放大器的输出端ITH和地。目前,在高频DC/DC的应用中,跨导型放大器应用更多。本文就以跨导型放大器进行讨论。
输出电压微小的变化反映到VFB管脚, VFB管脚电压与参考电压的差值被跨导型放大器放大,然后输出,输出值为VITH,跨导型放大器输出连接到电流比较器的同相端,电流比较器的反相端输入信号为电流检测电阻的电压信号VSENSE。由此可见,对于电流比较器,电压外环的输出信号作为电流内环的给定信号。对于峰值电流模式,工作原理如下:在时钟同步信号到来时,高端的主开关管开通,电感激磁,电流线性上升,电流检测电阻的电压信号也线性上升,由于此时电压外环的输出电压信号高于电流检测电阻的电压,电流比较器输出为高电压;当电流检测电阻的电压信号继续上升,直到等于电压外环的输出电压信号时,电流比较器的输出翻转,从高电平翻转为低电压,逻辑控制电路工作,关断高端的主开关管的驱动信号,高端的主开关管关断,此时电感开始去磁,电流线性下降,到一个开关周期开始的时钟同步信号到来,如此反复 [2]。

电流模式的Buck变换器需要精密的电流检测电阻并且这会影响到系统的效率和成本,但电流模式有更多的优点:①反馈内在cycle-by-cycle峰值限流;②电感电流真正的软起动特性;③精确的电流检测环;④输出电压与输入电压无关,一阶的系统容易设计反馈环,动态响应快、系统的稳定余量大稳定性好,增益带宽大,即便是输出只用陶瓷电容,也容易设计补偿,补偿管脚只用简单RC网络就能对输出负载瞬态作出稳定响应;⑤精确、快速的电流均流,易实现多相位/多变换器的并联操作得到更大输出电流;⑥允许大的输入电压纹波从而减小输入滤波电容,提高了输入的功率因素;输出允许用陶瓷电容,因此这种模式更省空间、省成本、体积更小、价格更便宜。但是,峰值电流模式中占空比大于50%时,系统的开环不稳定,产生次谐波振荡;而且系统会受到电流噪声的干扰而误动作。
3 理想的电压模式向电流模式转化
3.1 理想电压模式中输出电容ESR取样形成的平均电流模式
理想的电压模式在一定的反馈网络参数下,很难在整个电压输入范围和输出负载变化范围内都能稳定的工作。输出负载变化可以通过加大输出电容同时使用ESR值大的电容来优化其动特性,尽管这样做导致系统的成本和体积增加,同时增大输出的电压纹波。
通常,从直观上理解,输出电容ESR和输出电容形成一个零点,对于电流模式,这个零点不是必需的,因为电流模式是单阶的系统,而且这个零点导致高频的增益增加,系统容易受到高频噪声的干扰。所以电流模式或者使用ESR极低的陶瓷电容,使ESR零点提升到更高的频率,就不会对反馈系统产生作用,或者再加入一个极点以抵消零点在高频段的作用,加入极点的方法就是在ITH管脚并一个对地的电容。
电压模式是LC形成的二阶系统,这个零点的引入可以一定的程度上抵消LC双极点的一个极点,使其向单阶系统转化。ESR越大,作用越明显。因此电压模式输出电压通常使用ESR大的电容。
另一方面,注意到,输出电压为:

Vco为输出电容的容抗上的电压,ΔIL为电感的纹波电流,ΔIL=α*Iout,α为电流纹波系数,一般取0.2~ 0.4。
输出电压的小信号值为:

若ESR小,式中后面的一项基本可以忽略;但是,由于电压模式通常使用ESR值较大的输出电容,这样ESR就不可以忽略,由于ESR的作用,相当于在输入电压的反馈信号中引入了一定程度的电流模式,电流模式反馈量为:

输出电容的ESR将采样的电流信号送到电压误差放大器的输入端,和输出电压信号加在一起,经过电压误差放大器放大,再送到PWM比较器,其工作的原理相当于平均电流反馈。在电压模式中,使用ESR大的输出电容,相当于引入一定程度的平均电流模式,从而增加系统对输出负载变化的动态响应,提高系统的稳定性。
3.2 理想电压模式中输入电压前馈形成的电流模式
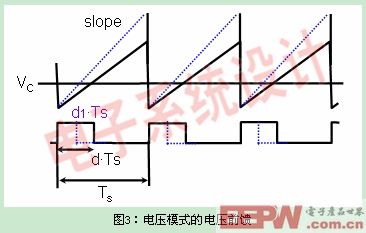
对于输入电压的变化,目前通常采用输入电压前馈技术,来提高系统对输入电压变化的响应。输入电压前馈如图3所示。图中的实线锯齿波为内部时钟信号产生的斜率固定为k的正常锯齿波,在没有电压前馈时,产生的占空比为d*Ts,则有以下公式:
Vc=k*d*Ts
输入电压前馈就是在内部锯齿波上加入随输入电压变化的斜坡,或者从VC信号减去此斜坡。当输入电压突然增加时,内部锯齿波和外加斜坡之和的波形为图3中的虚线所示。若外加斜坡的斜率为ks,则总的斜率为:k+ks,注意到:ks∝Vin,也就是ks=k*Vin*Vin,所以此时的占空比为:

即:占空比随输入电压的增加立刻而减少,系统提前对输入电压变化做出相应的响应。
若不考虑效率,由功率平衡可以得到:Vin*Iin=Vout*Iout,所以有;
从上式可以看到,所加的输入电压前馈信号也就是输入的电流信号。事实上可以这样理解:输入电压前馈技术也就是在理想的电压模式中,叠加一定的电流反馈,以形成一定的电流反馈,从而增加系统对输入电压变化的响应。
4 理想的电流模式向电压模式转化
4.1 轻载时电流模式趋向于电压模式
电源系统进入轻载或空载时,变换器通常工作在突发模式和跳脉冲模式 [3]。对于跳脉冲模式,变换器进入非连续电流模式,高端的开关管的开通时间为控制器所设定的最小导通时间,同时在有一些开关周期,高端的开关管不导通,也就是屏蔽,或跳去一些开关脉冲,以维持输出电压的调节。注意到:在轻载或空载时,电流信号很小,系统也很难检测到电流信号,另一方面,由于高端的开关管的开通时间固定为最小导通时间,已不受电流检测信号的调节,电流反馈事实上已经不起作用,也就不参与到反馈环节。系统此时工作于标准的电压模式。
对于突发模式,输出电压完全由滞洄比较器控制,滞洄比较器控制通过检测输出电压的变化,将输出电压设定在允许的上限和下限的范围内,系统此时也是工作于标准的电压模式。
4.2 使用大的电感值趋向于电压模式
输出电感的选择及设计是基于输出DC电压的稳态和瞬态的要求。较大的电感值可减小输出纹波电流和纹波电压,减小磁芯的损耗,但在负载瞬变过程中改变电感电流的时间会加长,同时增大电感的成本和体积。较小的电感值可以得到较低的直流铜损,但是交流磁芯损耗和交流绕线电阻损耗会变大。
同时使用大的电感时,电感电流的斜率减小,在理想的状态下,若电感值为无穷大,那么在整个开关周期,电感电流为直流值,电流检测信号就不在起作用,也就是标准的电压模式。因此使用的电感值越大,工作于电流模式的控制就越接近于电压模式,在负载瞬变过程中,系统动特性越差。因此对于电流模式,折衷的方法是选择电感纹波电流峰峰值在输出负载电流额定值的20%到40%之间。
4.3 斜坡补偿的电流模式趋向于为电压模式
理论上,当占空比大于50%时,电流模式就要加斜坡补偿,系统才能稳定的工作。否则,就会产生次谐波振荡。在实际的应用中,占空比大于40%时,就要加斜坡补偿。占空比大于50%时,斜坡补偿,由于电感充分激磁,而去磁不足,因此输出的电压将比预设定的值高,并将继续升高,直到较慢的电压控制回路调整电流设定点为止,然后输出电压又下降至低于期望值,形成次谐波振荡,其典型的特性就是在一个开关周期,脉冲宽度较宽,在下一个开关周期,脉冲宽度变窄,在每三个开关周期,脉冲宽度又变宽,如此反复。此时可以看到输出电压不稳定,有时还可以听到音频的噪声。
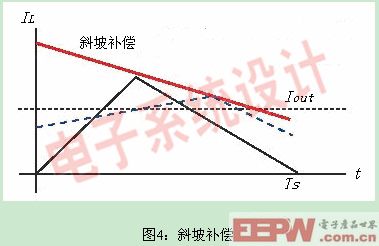
图4中,红线斜坡补偿,实线三角形波为没有加斜坡补偿的电感的电流波形,虚线为加斜坡补偿的电感的电流波形。如果用下降沿的锯齿波电压,则其加在电压误差放大器的输出上,用以控制电流检测信号;如果用上升沿的锯齿波电压,则其加在电流检测信号上,然后与电压误差放大器的输出进行比较。
注意到,内部的斜坡补偿将使总的电流斜坡减小,即斜坡补偿使真正的电感电流的斜率降低,从而促使变换器从电流模式向电压模式转化,所加的斜坡补偿越大,变换器越接近电压模式。同时,斜坡补偿也降低了电流环路的增益,降低的系统内部设定的限流点,使系统实际所加的负载电流值降低。
参考文献
[1] A.I. Pressman. Switching Power Supply Design (second edition). New York: McGraw-Hill Publishing Co., 1998.
[2] 刘松. 降压变换器电流取样电阻三种位置的选择. 电子设计应用, 2008, (2): 111 ~ 113.
[3] 刘松. BUCK变换器轻载时三种工作模式原理及应用. 电力电子技术, 2007, 41(11): 75 ~ 76.
作者介绍:刘松,男,硕士,1971生,籍贯湖北省武汉市, 万代半导体元件有限公司应用中心经理,曾任凌特有限公司上海办事处应用工程师,ST意法半导体上海有限公司高级电源系统工程师,现主要从事开关电源系统及模拟电路的应用研究和开发工作。发表论文30多篇,获发明专利一项及广东省科技进步二等奖一项。











评论