
Modbus RTU协议在MCF51QE128上的实现
工业控制已从单机控制走向集中监控、集散控制,如今已进入网络集约制造时代。工业控制器连网也为网络管理提供了方便。Modbus就是工业控制器的网络协议中的一种。Modbus协议是应用于电子控制器上的一种通信规约。通过此协议,控制器相互之间、控制器经由网络(例如以太网)和其他设备之间可以通信。它已经成为主流的工业标准之一。不同厂商生产的控制设备通过Modbus协议可以连成工业网络,进行集中监控。
Modbus通信协议
1 通信传送方式
每一个数据字节包括:每个字节的位、1个起始位、8个数据位、最小的有效位先发送、1个奇偶校验位(无校验则无)、1个停止位(有校验时)、2个停止位(无校验时)。
编码系统:8位二进制
字节组成:1bit起始位、8bit数据位,最低位最先发送、1bit奇偶校验位、1bit停止位(或者没奇偶校验位,就发送一个附加的停止位)。
2 数据帧结构
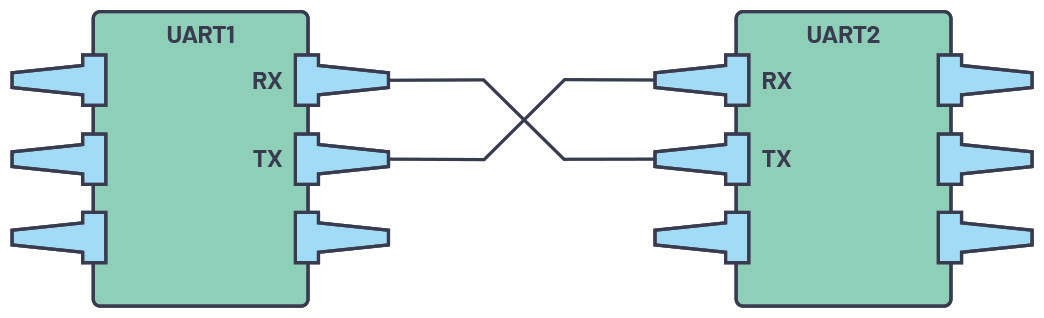
地址码:地址码为通信传送的第一字节。这字节表明由用户设定地址码的从机将接收由主机发送来的信息。并且每个从机都有唯一的地址码,并且响应回送均以各自的地址码开始。主机发送的地址码表明将发送到的从机地址,而从机发送的地址码表明回送的从机地址。
功能码:通信传送的第二字节。ModBus通信规约定义功能号为1~127。根据实际需要只利用其中的一部分功能码。作为主机请求发送,通过功能码告诉从机执行什么动作。作为从机响应,从机发送的功能码与从主机发送来的功能码一样,并表明从机已响应主机进行操作。如果从机发送的功能码的最高位为1,则表明从机没有响应操作或发送出错。
表1 每一个完整的数据帧构成

数据区:数据区根据不同的功能码而不同。数据区可以是实际数值、设置点、主机发送给从机或从机发送给主机的地址。
CRC码:二字节的错误检测码。冗余循环码检查(CRC)包含两字节,即16位二进制。CRC码由发送设备计算,放置于发送信息的尾部。接收信息的设备再重新计算接收到信息的CRC码,比较计算得到的CRC码是否与接收到的相符,如果两者不相符,则表明出错。CRC码的计算方法是,先预置16位寄存器全为1。再逐步把每8位数据信息进行处理。在进行CRC码计算时只用8位数据位、起始位及停止位,如有奇偶校验位的话也包括奇偶校验位,都不参与CRC码计算。
在计算CRC码时,8位数据与寄存器的数据相异或,得到的结果向低位移一位,用0填补最高位。再检查最低位,如果最低位为1,把寄存器的内容与预置数相异或,如果最低位为0,不进行异或运算。
这个过程一直重复8次。第8次移位后,下一个8位再与现在寄存器的内容相异或,这个过程与以上一样重复8次。当所有的数据信息处理完后,最后寄存器的内容即为CRC码值。CRC码中的数据发送、接收时低字节在前。在实际应用中,为了提高运算速度,采用了查表的方法取代计算方法。
3 Modbus RTU数据帧结构
在RTU模式下,每一个数据帧之间的间隔至少是3.5个字符位。一个完整的数据帧必须要连续的传送,当一帧消息中两字节间的间距大于1.5字符位时,此数据帧错误,被接受方放弃。
当通信波特率小于等于19 200b/s。对1.5个字符位/3.5个字符位计算时间有严格要求。当通信波特率大于19 200b/s。1.5个字符位固定为750μs,3.5个字符位固定为1.75ms。官方的Modbus RTU规定标准为3.5个字符长周期,不同的串口设备由于使用环境不同可能在发送中出现5~10字长的间隙。对于Modbus RTU来说比较安全的设置为50ms。
4 用到的功能代码
用到的功能代码如表2所示。
表2 功能代码

MCF51QE128的主要特性
系统核心控制器采用的是Freescale公司推出的32位单片机MCF51QE128。它是一款32位ColdFire V1 MCU,特点包括:停止电流降至370nA,6μs唤醒时间,超低运行电流为50mA;50.33MHz ColdFire V1内核运行频率;25.165MHz的总线频率;最大为8KB的RAM;最高128KB的闪存;24信道的12位ADC;两个模拟比较器;2xSCI、2xI2C、2xSPI;一个6信道和两个3信道的定时器PWM模块;RTC;最多70路通用输入/输出(GPIO);系统集成频率锁定环(FLL)和软件看门狗;内部时钟源(ICS);低功耗外部32kHz振荡器;电压范围为1.8~ 3.6V;增强型内部振荡器、电压调节器和实时计数器。通用开发环境是CodeWarrior for Microcontrollers 6.0。
软件设计
1 接收软件流程
如图1所示。
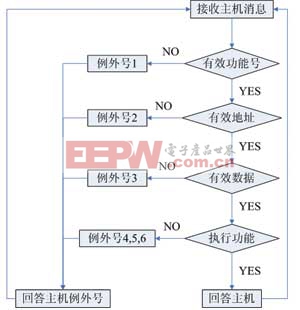
图1 从机软件流程
2 配置串口和定时器
void usart_init()
{
SCI1C1=0x13;//9bit character mode,odd parity
SCI1C2=0x2c;
SCI1BDL=0x29;//38400bps
SCI1BDH=0;
}
void timer3_init(void)//8MHz主时钟1333Hz中断判断命令包结束
{
TPM3CNTH=0;
TPM3CNTL=0;
TPM3MODH=0x49;
TPM3MODL=0xbe;
TPM3SC=0x48;
}
3 MCF51QE128解包modbus RTU的程序
void interrupt VectorNumber_ Vsci1rx SCI_RX_ISR(void)//字节接收程序
{
if(SCI1S1_PF==1)communication_error=1;//字节校验错误置通信失败标志位
*(pointer_RX1)=SCI1D;//将数据放入缓冲队列
pointer_RX1++;//队列指针后移
len_RX1++;//收到字节长度加1
timer3_reset();//定时器复位
timer3_init();//定时器重启动
}
void interrupt VectorNumber_Vtpm3ovf Timer3_ISR(void)//判断命令包接收结束
{
timer3_cnt++;//定时器中断次数加1
if(timer3_cnt==2)
{
timer3_reset();//定时器复位
pointer_RX1=Buffer_RX1;//队列指针初始化
full_RX1=1;//收完置标志位
}
}
4 CRC查表产生函数
由于篇幅有限,此处不再详述,表具体内容可参照相关参考文献。
总结
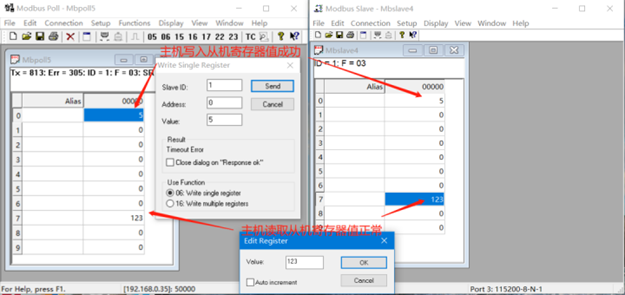
笔者的设计基于MCF51QE128控制核心来实现Modbus协议,已经成功进行了实际应用,通信可靠,而且实现起来比较容易。该设计为采用MCF51QE128微控制器进行工业产品设计通信的应用提供了参考方案。






评论