
现场总线 iCAN 网络在工程机械中的应用
一.CAN-bus总线简介:
CAN-bus总线是国际上应用最广泛的现场总线之一,最初被设计用作汽车电子控制单元(ECU:ElectricControlUnit)的串行数据传输网络,现已被广泛应用于欧洲的中高档汽车中。近几年来,由于CAN-bus总线极高的可靠性、实时性,CAN-bus总线开始进入中国各个行业的数据通讯应用,并在2002年被确定为电力通讯产品领域的国家标准。
CAN-bus网络使用普通双绞线作为传输介质,采用直线拓扑结构,单条网络线路可以连接到110个节点。当通讯距离不大于40米时,传输速率可达到1Mbps;当使用5Kbps传输速率(收发器PCA82C250/251支持),同一物理网络可达10公里的通讯距离。CAN-bus总线的适用范围:可适用于节点数目比较多,传输距离在10公里以内,安全性、可靠性要求高的场合;也可适用于对实时性、安全性要求十分严格的机械控制网络。
目前,国内的汽车、电梯行业已是CAN-bus应用的典型领域,工业控制、智能楼宇、煤矿设备等行业也得到了广泛的应用。
二.CAN-bus总线在工程机械中的应用
由于嵌入式电脑、网络通讯、微处理器、自动控制等先进技术的日渐广泛应用,工程机械控制系统的性能和集成度已经有了很大的提高。而CAN-bus总线由于良好性能,特别适合于工程机械中各电子单元之间的互连通讯。随着CAN-bus总线技术的引入,工程机械中基于CAN-bus总线的分布式控制系统取代原有的集中式控制系统,传统的复杂的线束被CAN-bus总线所代替:系统中各种控制器、执行器以及传感器之间通过CAN-bus总线连接,线缆少、易敷设,实现成本低,而且系统设计更加灵活,信号传输可靠性高,抗干扰能力强。
目前CAN-bus总线技术在工程机械上的应用越来越普遍。国际上一些著名的工程机械大公司如CAT、VOLVO、利勃海尔等都在自己的产品上广泛采用CAN-bus总线技术,大大提高了整机的可靠性、可检测和可维修性,同时提高了智能化水平。而在国内,CAN-bus总线控制系统也开始在工程汽车的控制系统中广泛应用,在工程机械行业中也正在逐步推广应用。
三.iCAN网络在工程机械中的应用
1.iCAN网络的介绍
iCAN协议即“IndustryCAN-busApplicationProtocol”,是现场总线CAN-bus的应用层协议之一,具有理解简单、易于实现、实时可靠的特点。iCAN网络是面向于自动控制领域、基于CAN-bus总线和iCAN协议的控制系统。该系统的目标就是解决用户在CAN-bus应用领域中的通讯控制或者数据采集问题。
将CAN-bus网络的数据链路层、物理层与一个高效的用户层结合在一起,既可以保障底层使用CAN-bus总线的高效、实时、可靠的特点,又能够建立一个易于实现、成本较低、效率良好的数据通讯网络方案。这就形成了一个基于现场总线CAN-bus的完整通讯网络以及数据采集方案,也就是iCAN网络的诞生。
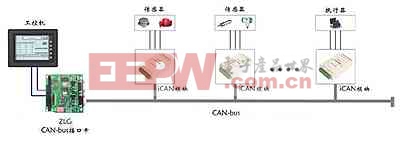
iCAN网络构建非常灵活,结构简单,成本较低;并且iCAN网络具有易于组态,安装、运行、维护简便的特点。iCAN网络组成结构如下图所示,包括了iCAN模块、CAN-bus接口卡以及CAN-bus网关/网桥设备。

iCAN网络的基础与核心是iCAN协议。iCAN协议是国内对于CAN-bus系统应用的一种全新尝试。iCAN协议的设计目标是:实现一种简单/可靠/稳定的CAN-bus应用层协议。
在iCAN协议的设计过程中,充分参考和借鉴了DeviceNet协议和CANopen协议。毕竟DeviceNet协议和CANopen协议是严谨和完善的,并经过实际工程验证。
制定iCAN协议是一个相当严谨的设计过程。这里主要考虑了一些关键因素:
CAN报文的分配
数据通讯的实现
网络管理
设备建模
通过以上技术问题的解决,一方面可以保证iCAN网络的高通讯效率、高数据可靠性,令基于iCAN协议的各个总线节点能够组成一个有机的整体网络;另一方面,通过在iCAN协议设备建模方面的尝试,可以使产品描述标准化,协议发展具有可延续性,保障后续产品开发过程中在通讯协议方面的的一致性。
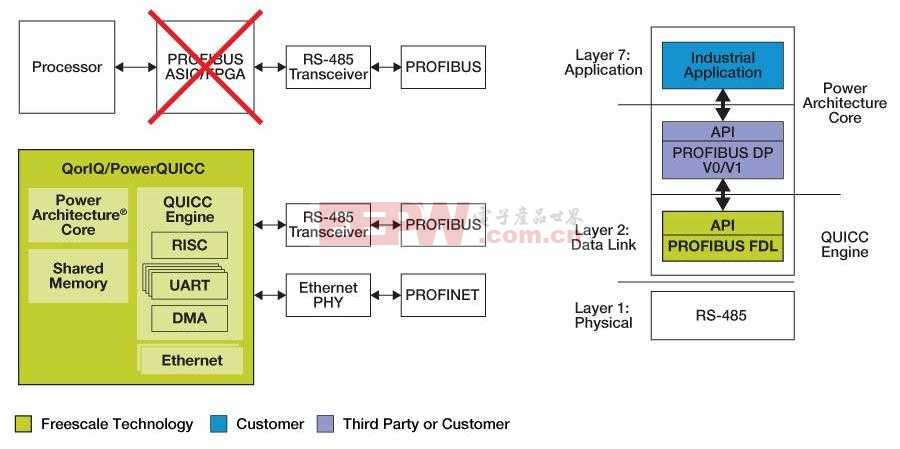
在iCAN网络中,可以根据需要增加CAN-bus网关/网桥设备,以适应实际系统的网络规模和通讯距离,以及用户终端设备在安装、布线等方面的要求。通过CAN-bus网关/网桥设备,iCAN网络也可以方便地互连其它类型的网络,比如串行通讯网络RS-232/RS-485、以太网EtherNet等,或者连接DeviceNet/CANopen网络。
2.工程机械中iCAN网络结构
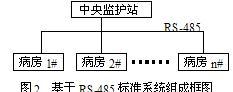
在工程机械中iCAN网络主要由工控微机、标准PC-CAN接口卡以及iCAN模块组成,系统结构如图2所示。
工控微机通过CAN-bus接口卡接入CAN-bus网络中,与总线进行数据交换,管理系统中各个iCAN模块及其它设备;实现系统中各设备参数监控、显示、人机界面以及各种控制功能。iCAN模块实现传感器的信号采集,并实现控制信号输出功能。
根据工程机械中的传感器、控制器类型的不同,选择合适的iCAN模块。iCAN模块的输入端口采集液压、发动机等系统中传感器的信号,并传送到总线上;输出端口根据来自总线上的控制信息操作执行机构,完成对于液压等系统的控制。
iCAN网络在工程机械中的应用,避免了复杂的信号连线,使控制系统的安装为何简单,运行可靠,应用灵活,并能够保证控制的实时性。
四.应用实例:起重力矩限制系统
1.简介
起重力矩限制系统为汽车起重机控制系统中一个重要组成部分。该系统通过对起重机械中长度传感器、角度传感器以及压力传感器等输出数据进行分析处理,实现对系统工作时起重力矩的实时监控,以保证起重机工作在安全状态下。而且该系统能够实时记录起重机作业中的危险工况,为事故的分析处理提供可靠的依据。
该系统要求能够实时采集长度传感器、角度传感器以及压力传感器的输出数据,其中长度传感器、角度传感器以及压力传感器的信号输出类型主要为电压或者电流信号,传感器信号的通道共有4路。此外系统要求提供4路数字量输出通道。
2.解决方案
起重力矩限制系统的CAN-bus解决方案为:系统采用一块PC104-CAN2I双路CAN接口卡、一个iCAN-4017模拟量输入模块以及一个iCAN-4050数字量输入输出模块。起重力矩限制系统结构示意图如下图3所示:
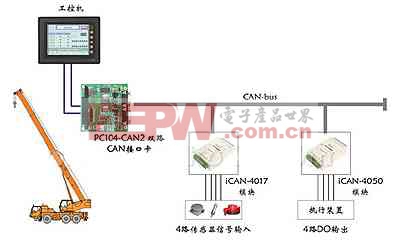
1)PC104-CAN2I双路CAN接口卡作为CAN网络主控设备,实现对于数据采集模块的管理。PC104-CAN2I接口卡配备2个通道CAN接口,CAN通道采用光电隔离措施,增强了系统在恶劣环境中使用的可靠性。电路板采用4层板技术,SMT工艺,抗干扰能力强,保障长期运行的稳定可靠。
2)iCAN-4017模拟量输入模块主要技术参数如下:
单电源供电,供电电压:+10V~+30VDC;
8路模拟量输入通道;
16位分辨率ADC;
电压输入范围:±10V(默认)、±5V、±2.5V、±1V、±500mV、±150mV;
电流输入范围:±20mA(需外接125Ω精密电阻)。
采用iCAN-4017模拟量输入模块的四路输入通道用于采集系统中长度传感器、角度传感器以及压力传感器的输出数据。
3)iCAN-4050数字量输入输出模块主要技术参数如下:
单电源供电,供电电压:+10V~+30VDC;
8路开关量输入通道;
8路开关量输出通道;
开关量输入信号:高电平:+3.5V~+30V,低电平:≤+1V;
开关量输出信号:集电极开漏输出,最大负载电压+30V,电流30mA。采用iCAN-4050数字量输入输出模块四路输出通道用于提供数字量输出信号。
3.系统说明
起重力矩限制系统通过iCAN模块检测各传感器的信号,各模块通过CAN总线将传感器数据传送到控制主机进行处理,系统工作状态实时显示在人机界面上。该系统能够警示危险工况,诊断并排除故障。在危险工况下,通过实时地控制输出模块,使系统处于安全状态,防止事故的发生。
起重力矩限制系统软件采用VC++开发。系统软件对传感器数据进行处理,实时获取系统工作状态,并以图形化的界面显示,在危险状态下及时发出报警信息,并可以根据键盘指令进行相应的控制。
在起重力矩限制系统中采用了iCAN-4017模块以及iCAN-4050模块各一个。在满足系统需求的基础之上,模拟量输入、数字量输入以及开关量输出均有剩余通道,可以方便未来产品功能的扩展。
该起重力矩限制系统的特点是:通过CAN-bus总线实现对各传感器信号的采集以及输出装置的控制,使得系统十分容易构建,布线安装十分方便;同时系统抗干扰能力强、可靠性高、实时响应性好。而且通过CAN-bus总线的应用,使该起重力矩限制系统的很容易作为一个子系统嵌入到起重机的控制系统中。
通过实际的运行测试表明,该系统运行稳定、可靠,维护接口方便,性能价格比较高。
五.结论
CAN-bus总线的应用使工程机械控制系统功能具有良好的可扩展性,易于实现对各分系统得集中监测和管理。此外CAN-bus总线的应用使用户的使用、维护、故障诊断更加灵活和方便,例如起重机在出厂调试时,工厂计算机系统可以通过CAN-bus总线访问其控制系统,记录保存调试数据,以作为在故障时维修的原始参考数据。
随着CAN-bus总线在工程机械中的不断应用,必将大大提高工程机械的可靠性、可检测、可维修性以及智能化水平。依靠强大的专业开发团队、NXP半导体的领先技术,我们始终执着于工程机械行业中CAN-bus总线的应用推广,为客户提供更多的优质的解决方案。









评论