
丰田中研开发识别距离达80m的激光雷达
丰田中央研究所试制出了车载近红外线激光雷达系统,配备在行驶的汽车上,可三维识别周围的行人、汽车、建筑物及地形等,并在“第61届应用物理学会春季学术演讲会”(2014年3月17~20日于日本青山学院大学相模原校区举行)上,公布了试制系统的实验结果(演讲编号:17p-E9-5)。
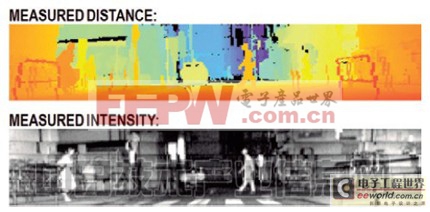
开发系统获得的距离信息(上)和图像(丰田中研在“ISSCC 2013”上公布的内容)
激光雷达是实现自动控制车速等的ACC(主动巡航控制系统)以及未来的自动驾驶要使用的核心技术。可由照射的激光及其反射光,实时三维识别周围的形状。还可与地图信息对照,推断当前位置。但目前能够买到的产品十分有限。各公司开展的自动驾驶实验大多使用美国Velodyne公司制造的激光雷达。丰田中研也曾利用Velodyne公司的产品进行过新一代驾驶系统的研究。
此次丰田中研使用的试制系统以6面反射镜来扫描波长为870nm的激光(图1)。该反射镜既可将激光二极管的光向周围发射,还可用于将对象物的反射光导入受光元件(光二极管)的光路控制。
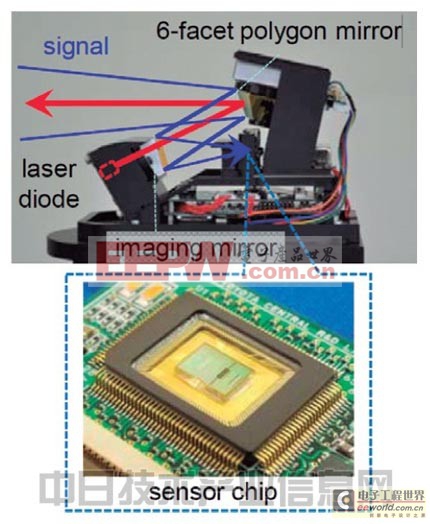
图1:激光雷达的受光部多面反射镜(上)和受光芯片。(照片由丰田中央研究所提供(《第61届应用物理学会春季学术演讲会演讲预稿集》、p.25、2014年3月))
对象物的反射光用该公司开发的专用芯片接收,获得二维图像。距离信息通过手势识别等使用的ToF(Time of Flight)方式来推断的。
专用芯片集成有16列×1个的受光元件。使用该受光元件,通过多面反射镜的1面来捕捉周围空间的16列×202点。也就是说,通过围绕多面反射镜的6个面(1帧)来拍摄96列×202点。帧频为10Hz。
专用芯片的受光部采用适于高灵敏化的雪崩光电二极管。因灵敏度提高,易受到会成为噪声的阳光等干扰,因此还采取了消除噪声影响的措施。具体为时空域直方图处理:以24点(6×4)为1组,只有组内的多个点同时检测到受光时,才视为接收到了激光反射光。受光元件和信号处理部集成在设计规则为180nm的CMOS芯片上。
经实验确认,识别出了假想为穿着黑衣服的行人的板状物体(宽30cm,反射率为9%)。反复进行了1000次的结果,80m以内的识别率达到90%以上。
另外,尽管光源使用的是激光,但据称用为脉冲宽度为4ns的脉冲状,达到了无损眼睛的安全标准。








评论