
DSP56F807在交流随动系统中的应用
1 随动系统的组成及功能简介
本文引用地址:http://www.amcfsurvey.com/article/241676.htm交流随动系统由交流电机、交流伺服驱动器、随动控制器、编码器(旋转变压器)、减速器等部分组成。如图1所示。
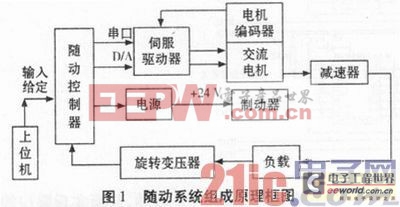
随动控制器是由DSP芯片为核心扩展而成的。它可以接收上位机传送的给定位置信息与编码器采集的实际位置信息,通过前馈PID控制算法,输出模拟电压量送入驱动器中,实现对负载运动状态的控制。控制器可以采集随动转塔的锁定信号和限位信号,并控制随动系统的工作状态。
驱动器是专为交流电机设计的,内部嵌有交流电机控制算法、与交流电机编码器构成速度环和电流环,可以利用其RS-232串口对其内部参数进行设置,比如最大加速度的设置以保证系统的响应特性;还可以接收驱动器使能信号,当使能信号为高时,控制电机锁紧,当使能信号为低时,控制电机与减速器解脱锁紧。
交流电机是随动系统的执行机构,由驱动器输出三相交流电压,控制电机的转速,通过减速器,最终实现对负载的位置控制。
制动器是用于在某些工作状态或故障状态时,为保护系统的安全性而设置的电机抱闸装置。当控制电压为零时,电机处于抱闸状态,当控制电压为+24 V时,电机处于解脱状态。
电源为随动系统中的各部件提供相应的电源,同时在随动控制器的控制下,控制电机制动器的工作状态。
本文主要介绍随动控制器中串行接口的设计、电气限位和制动的实现。
2 DSP56F807处理器的特点
●计算机具有独立的数据存储空间和程序存储空间,支持并行处理;在80 MHz时钟频率下,可达到40 MIPS的指令执行速度;单指令周期可以完成16位×16位的并行乘-加运算。
●特殊的多功能DSP指令,即一条指令可以完成几种不同的操作;针对电机控制DSP集成了许多相关的外设模块。增加了电机控制系统的集成度,并有效地降低了系统的成本,同时还使系统的可靠性大大提高。
●支持C语言编程,C语言与汇编语言的混合编程更加灵活、方便。JTAG/OnCE程序调试接口,允许在系统设计过程中随时进行调试,并可对软件进行实时调试。
●电源采用3.3 V供电,但允许输入端口使用5 V TTL电平。
3 随动控制器
该部分的设计采用子母板架构,子板具有独立的复位电路、时钟电路,以及JTAG接口。母板只需要设计串口电路,锁定、限位控制电路等。
3.1 串口电路的设计
串口电路如图2所示。
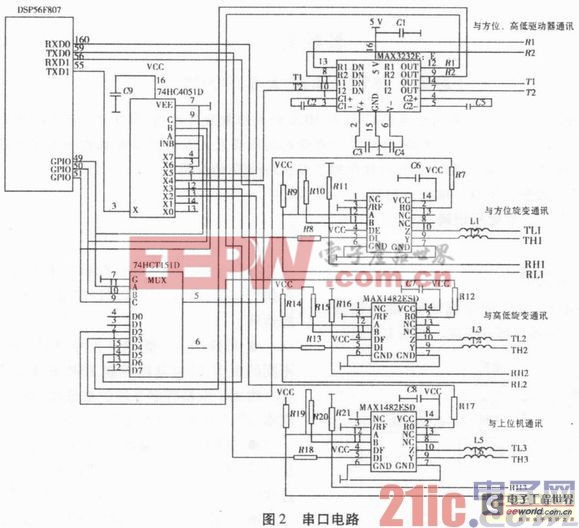
随动控制器需要与高低、方位伺服驱动器,高低、方位旋转变压器以及上位机等进行通讯,而DSP56F807只有两路串口0、串口1,远不能满足要求,因此需要将两路串口扩展成为5路。
串口0的GPIO RXD0、GPIO TXD0直接通过MAX1482ESD转换成RS-422接口,与上位机进行通信。串口1的GPIO RXD1、GPIO TXD1通过MAX3232转换成两路RS-232接口分别与高低、方位驱动器进行通信,通过两片MAX1482ESD转换成两路RS-422分别与高低、方位旋转变压器进行通信。
接收选用8选一数据选择器74HCT151D,发送选用8通道多路器74HC4051D。将DSP的GPIO管脚49、50、51做为74HCT151D和74HCA051D的输入A、B、C经过译码成8路接收或发送来自不同通道的信号。
与RS-422接口通信采用MAX1482ESD低功耗收发器,接收输出使能端RE为低,输入A大于B,接收输出端RO为高;反之,输入A小于B,接收输出端RO为低。接收输出使能端RE为高,接收输出端RO为高阻状态。发送输入使能端DE为高,发送输入端DI为低,输出差分信号Y端为低,Z端为高;反之,发送输入端DI为高,输出差分信号Y端为高,Z端为低。发送输入使能端DE为低时,发送输入端DI无效,输出端Y、Z为高阻状态。
3.2 电气限位和制动
3.2.1 限位的种类及原理


评论