
基于CC2431的无线定位技术的研究
引言
GPS等卫星导航定位技术广泛应用于各种领域。然而在室内、地下等场合的定位需求却有其局限性。近几年来,随着IEEE802.15.4商业标准的逐渐完善,无线传感器网络(WSN)的相关技术开始被广泛讨论和研究。随着,TI公司提出带硬件定位引擎的片上系统(SoC)解决方案CC2431。以及WSN用于无线定位技术被广泛研究,该器件能满足低功耗ZigBee/IEEE802.15.4无线传感器网络的应用需要,CC2431的定位引擎基于接收信号强度指示RSSI(ReceivedSignalStrengthIndicator)技术,相比于集中型定位系统,RSSI功能降低网络流量与通信延迟,在典型应用中可实现3~5m的定位精度和0.25m的分辨率。这里基于RSSI定位技术,详细介绍CC2431无线定位系统的构成、定位原理,并实现了基于CC2431无线定位系统的设计。
2CC2431简介
CC2431以强大的IAR集成开发环境为支持,结合Zig-Bee协议栈、工具包和参考设计,展示领先的ZigBee解决方案,其产品广泛应用于汽车、工控系统和无线传感器网络等领域,同时也适用于ZigBee之外的2.4GHz频率的其他设备。CC2431的定位引擎基于RSSI技术.根据接收信号强度与已知参考节点位置准确计算出有关节点位置。然后将位置信息发送至接收端。
3基于CC2431定位原理及实现
3.1RSSI定位技术
RSSI是指节点接收到的无线信号强度大小。在基于RSSI的定位中,已知发射节点的发射信号强度,接收节点根据接收到信号的强度计算出信号的传播损耗。利用理论和经验模型将传输损耗转化为距离.并进一步利用三角定位法确定待定位节点位置。该技术硬件要求较低、算法相对简单,并且一些通信协议中已携带有RSSI的信息,这样使得基于RSSI定位方法具有广泛的应用前景。该技术在实验室环境中表现出良好特性,但由于环境因素变化等原因.实际应用中还需进一步改进。
3.2基于CC2431的定位系统
定位系统由参考节点和定位节点组成。参考节点是一个位于已知位置的静态节点,该节点确知自身的位置并可将其位置通过发送数据包通知其他参考节点(采用CC2430)。定位节点从参考节点处接收数据包信号,获得参考节点位置坐标及相应的RSSI值并将其送入定位引擎,然后读出由定位引擎计算得到的自身位置。
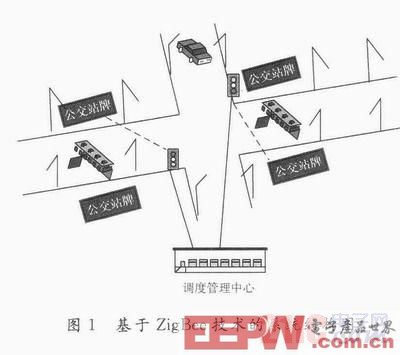
由参考节点发送给定位节点的数据包至少包含参考节点的坐标参数水平位置X和垂直位置Y。而RSSI值可由接收节点计算获得。图1为具体定位系统原理框图。
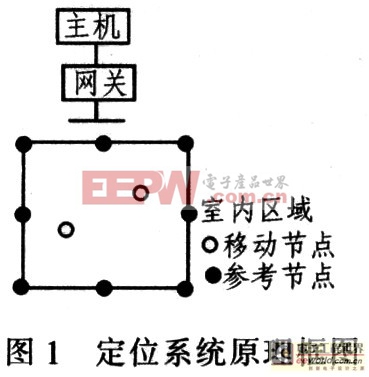
该定位系统原理框图中各部分的作用如下:
(1)主机采用一台普通的PC,主机连接网关实现对整个网络的工作调度,编写的定位软件可实时观察各个定位节点和参考节点的运行情况。
(2)网关该网关用于组建一个ZigBeeWSN网络,并充当协调器,把定位节点坐标及外部环境参数传送给主机。
(3)参考节点在网络中充当路由器的角色。而且在定位系统中,它由用户指定固定坐标,并为定位节点提供该坐标和RSSI平均值。参考节点(referencenode)是一种已知静态节点,其坐标(x,y)是固定的,并且不参与定位计算,可由CC2430或CC2431器件实现。一个定位区域通常由8个参考节点组成。系统至少需要3~4个参考节点才能进行定位。本文采用CC2430作为参考节点来实现。
(4)定位节点其内部具有定位引擎,能够根据参考节点提供的同定坐标和RSSI平均值计算出自身的精确位置(坐标),并把该坐标协同定位节点标识号发送给网关。本文中核心器件采用CC2431实现。
3.3定位工作流程
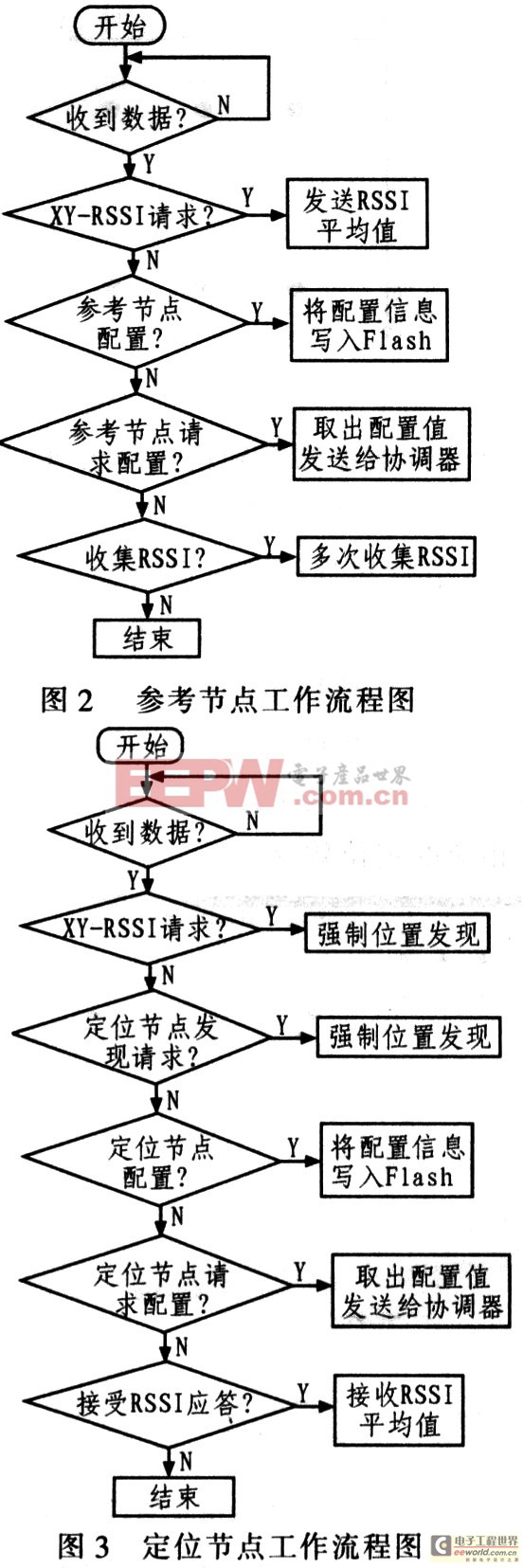
定位节点(blindnode)是一类可移动的节点,可在参考节点包围的区域内任意移动。定位节点接收区域内所有参考节点的RSSI值后,通过定位算法来计算其坐标位置。定位节点南CC2431器件实现。采用该器件,可实现0.25m的定位分辨率和3m左右的定位精度,定位时间小于40μs。图2是参考节点工作流程图,图3为定位节点工作流程图。
4ZigBee定位系统实验结果及分析
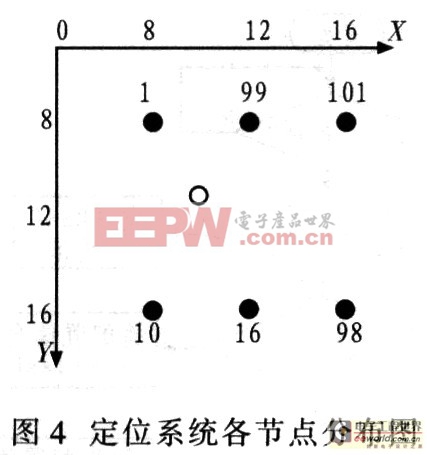
实验区域描述:本实验在教学楼五楼实验室进行:长×宽=8.13m×8.10m,在本次实验中使用6个参考节点和1个定位节点,各参考节点坐标设置如图4所示。参考节点旁边的数字为节点编号,6个参考节点(黑色的为参考节点)坐标依次为(单位为m):1(8.00,8.00),99(12.00,8.00),101(16.00,8.00),10(8.00,16.00),16(12.00,16.00),98(16.00,16.00)。
表l为本次实验所测的数据,(x,y)为定位节点的实际所处位置的坐标,(x1,y1)为上位机GUI软件所测的定位节点坐标数据。一共测得21组数据,如表1所示。

以上所测得的数据除个别误差较大外,如第11,14,16,17组数据;其他的都比较接近节点的真实位置。误差的来源较多,比如定位节点靠近墙壁时误差会比较大,定位节点天线的朝向对误差的大小也有较大影响。
图5是根据相关通信协议编写的上位机无线定位软件ZWS_lum的界面,黑色的点代表参考节点,白色的点代表定位节点。当定位节点靠近或远离参考节点时,在程序中可以清楚的看到相应的定位效果。
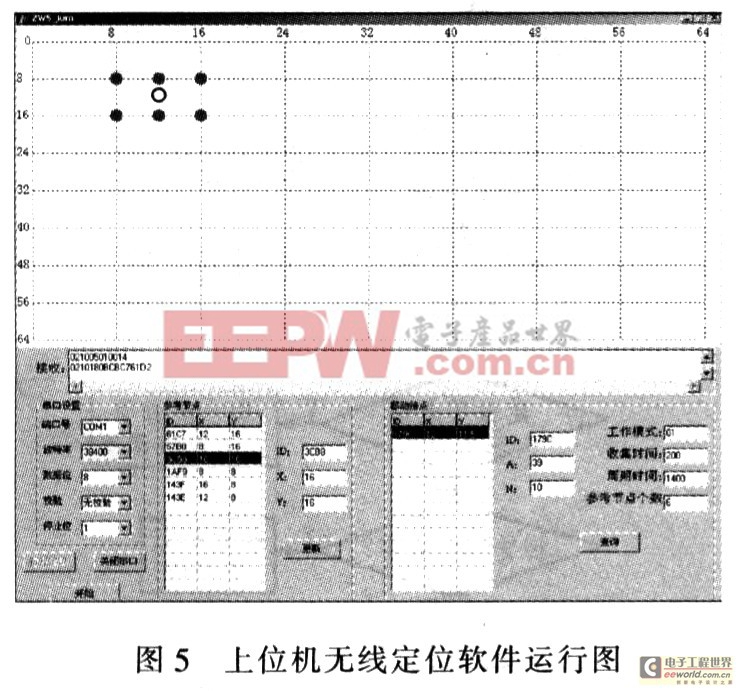
该软件不仅可以显示实际的组网信息,而且还可以:对于参考节点,显示其X、Y坐标,并可以修改在平面区域的X、Y坐标,然后刷新到该拓扑图上,这样可以根据实际定位区域的需要来布置参考节点;对于定位节点,可以显示其在平面区域的实时位置信息,表1中的坐标(x1,y1)信息就是通过该软件获取得到的。该信息每隔5s更新一次,另外还可以通过该界面查看定位节点配置参数信息。
5结束语
CC2430/2431是一款针对无线传感器网络ZigBee/IEEE802.15.4的片上系统(SoC)解决方案,其硬件定位引擎具有硬件设备要求低、定位精度高的特点,很好地满足了市场需求。采用该方式组网建立室内定位系统可达到1~2m之内的定位精度。通过合理布设参考节点,该系统可应用在楼内、地下、隧道等场,所实现高精度室内定位,因此,可以预见,基于ZigBee的无线定位技术在未来将会有很好的发展及应用。




评论