
基于WINCE的CAN驱动的研究与实现
5 运行设计
5.1 运行控制
1 整个父设备连同子设备在同一个线程下工作。注意不要阻塞了线程。
2 通过MCGS_DATA data可以得到接口指针,方法如下(MCGS_DATA是MCGS组态软件中封装了重要的用户数据的结构体):
MCGS_DATA* pData;
pData = (MCGS_DATA*)data.m_pParentData;
if (pData)
{
g_pDevCanProxy = (CDevCanProxy*)pData->m_pParentData;
if (g_pDevCanProxy)
{ //下面就可以对Can卡进行读写操作了
g_pDevCanProxy->SvrWriteAndRead(dwAimCanId, SendBuf);
}
}
5.2 运行时间
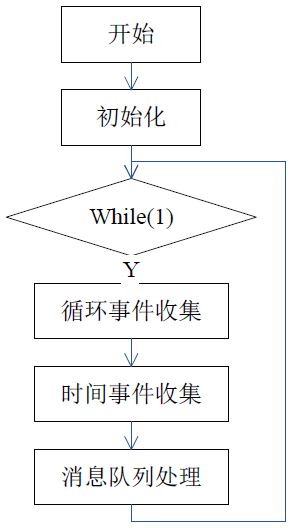
由于父设备连同子设备在同一个线程下工作,根据WINCE的消息响应机制,每个子设备论询采集消息,CPU执行消息队列如下所示:
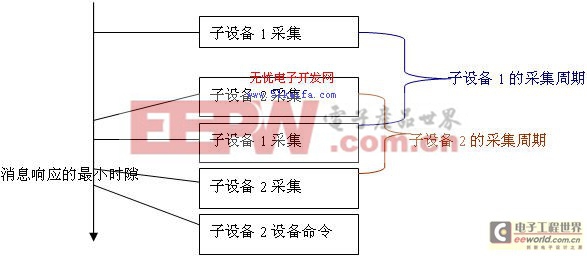
在运行环境中,WINCE的消息响应的最小时隙为2毫秒,每个子设备的采集又有一个采集周期,设备命令是没有时间周期概念的,按照Windows消息队列来处理。
第一种,如果按照主从模式来开发子设备就先假设了子设备(CAN设备)不会主动发送数据,并且不会收到上个设备的干扰数据,在一般情况中这是不可能的。但可以这样处理,在向设备发送数据时,先等待一个周期,保证没有上个设备的干扰数据,再把它清空,最后才进行正常的设备采集工作。
第二种,如果按照分布式实时控制模式进行开发,主要流程包括按照协议组合数据包,发送帧信息,接收帧信息和解析数据包。
5.3 系统出错处理设计
设计原则:能从硬件上屏蔽数据的尽量从硬件上屏蔽(初始化设置控制器,验收寄存器和屏蔽寄存器),再从软件上屏蔽数据。如果不能达到设备地址解析一致性,就认为设计上是有缺陷的。当驱动不能通讯时,重启运行环境或进行复位操作就可以了。
6 结论
在本文中,首先介绍了CAN的基本原理以及在工业中的应用。然后以CAN在嵌入式系统的使用为例,提出了解决了CAN在实际中的系统设计,优化方案以及代码实现,并给出了在基于WINDOWS CE下的工控机上的具体实现。
在北京中联克龙科技发展有限公司,天地科技股份有限公司常州自动化分公司等公司,该系统解决方案都达到了令人满意的效果,满足了用户远程高速通讯的要求,能长期稳定的运行。这些项目的经济效益到达了五百万元。
本文作者创新点:提出了CAN在实际中的系统设计,优化方案以及代码实现,设计并实现了基于WINCE的满足工业现场要求的CAN驱动。
参 考 文 献
[1]WINDOWS CE 内核定制及应用开发 作者:周毓林。
[2]吴振纲,陈虎.PLC的人机接口与编程[J].微计算机信息,2005,8-1:21-23。
[3]WINDOWS CE 权威指南 作者:(美)Chris Muench。
[4]Windows VxD与设备驱动程序权威指南(第二版) 作者:孙喜明译。













评论