
浅论六轴机器人在机床上下料中的应用
整套设备组成:
1、X轴:采用Roboworker品牌的一根加强型RSL300直线运动单元,齿轮齿条传动,其有效行程12米。RSL300安装到机器人支架上。
2、Y轴:采用X轴同样的直线运动单元,其有效行程500mm。
3、Z轴:作为上下运动轴,它是一根独立的RSL300直线运动单元,Z轴安装到Y轴一端,随XY同时水平运动,但可独立上下运动,其有效行程1.4m,额定提升力300公斤。
4、3个旋转轴:采用精密减速机和伺服电机,可以任意角度旋转。
5、手爪:主要由Festo气缸带动手指运动。
6、下料传送带一条,上料工作台一个,桁架和防护。
7、控制系统1台;
三、从工装A到工装B的工作过程
本项目中最大的难点之一是如何把工装A上的排气管取下,经A轴和C轴的各自转动及B轴的摆动后装到工装B上。这里还有考虑机床内部空间对手爪运动轨迹及空间的限制。
具体工作过程是先用手爪从A工装抓取工件,然后顺着A工装方向取下排气管。排气管离开A工装后,被按到B工位的方向。然后手爪按B工装的导向柱把排气管安装到B工装上。图4给出了这一简单过程。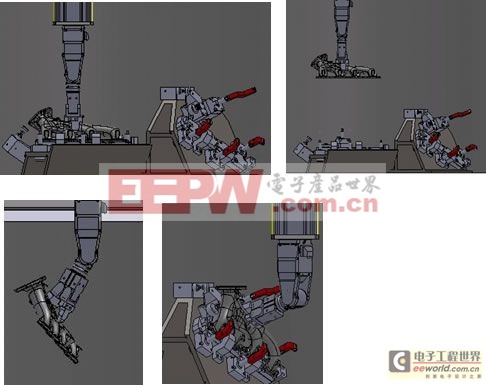
图4:左上图表示从工装A上抓住排气管。右上图表示把排气管取下后升高及转动。左下图表示排气管被调整到与工装B要求的方向。右下图表示把排气管按55.8度方向装到工装B上。
四、结论
对于这类加工中心上下料任务采用传统的直角坐标机器人是无法完成的。就算在Z轴上加两个旋转轴也没法完成工件的方位变化。而采用轨道加关节式机器人可以完成这类任务,但其占地空间大,采购和维护成本非常高。而沈阳莱茵机器人有限公司开发的这张混合型六自由度机器人结合了直角坐标机器人和关节机器人的优点,非常适合这类上下料任务。此为混合型六轴机器人还非常适合冷冲上下料,大型零件的焊接和切割等复杂任务。目前我公司已开发几款混合型直角坐标机器人,它们有非常广阔的应用前期。

伺服电机相关文章:伺服电机工作原理

评论