
一种智能化倒车雷达主控芯片设计
1 引言
对于很多司机尤其是新手来说,倒车无疑是件非常头痛的事,倒车雷达正好可以帮司机解决这个难题,因此越来越多的商家进入了这个市场。从目前市场情况看,国内倒车雷达生产厂家都是使用单片机配合外围运放、锁相环电路完成超声波测距并提供报警的工作,缺乏单芯片方案,而使用单片机方案要求生产厂家必须具备开发软硬件的能力,而且利用软件控制存在不稳定的因素。如果能用专用芯片实现整个系统功能,对倒车雷达生产商来说,不仅能降低开发和生产成本,对整机的可靠性也有很大提高。
2 系统概述
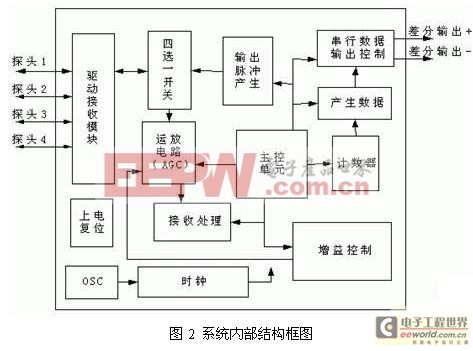
2.1 系统框图
2.2 功能概述
系统提供4个超声波探头接口,接收到反射回来的信号后,根据发送和接收的时间差判断障碍物距离的危险等级,输出相应报警信号。报警信号编码后采用双线差分方式输出,输出信号的内容包括:各探头检测到的障碍物距离的危险等级、最近障碍物的方位、最近障碍物的距离值和附加消息。
2.3 接口协议
报警信号采用双线差分串行输出的方式,目的是提高传输信号在长距离和强干扰环境下的传输正确性。双线差分传输具体格式是:ALOUTP输出实际需要的信号,ALOUTN 则输出与ALOUTP相反的电平信号。
2.3.1 倒车模式
报警信号以数据包格式输出,每个数据包包括3个字节,格式和内容如下所述:
第一个字节:第一字节高四位为起始标志,用于说明此报警数据是倒车模式下的数据还是扒车模式下的数据,倒车模式是“0101”,扒车模式是“1010”。倒车模式下数据格式如图3所示,第一字节的低2两位用于输出附加消息,输出数据指示1或4探头是否进入环境适应模式,S1表示探头1是否进入环境适应模式,“1”表示进入环境适应模式,“0”表示正常倒车模式;S4表示探头2是否进入环境适应模式,“1”表示进入环境适应模式,“0”表示正常倒车模式。低4位SX1和低3位SX0表示最近障碍物的方位,00表示是探头1方向,01表示是探头2方向,10表示是探头3方向,11表示是探头4方向。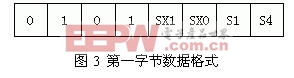
第二个字节:如图4所示,SXA和SXB表示X号探头检测到的障碍物的危险等级,危险等级分为安全、警告、危险、停车4级,分别用00、01、10、11 表示。例如第二字节数据为“10010000”,表示第一个探头检测到危险状态,第二个探头检测到警告状态,第三和第四个探头为安全状态。
第三字节:第三字节输出最近障碍物的距离值,数据格式如图5所示,DA1DA0表示最近障碍物距离的第一位数据,按BCD编码,最大值为3;DB0~DB3表示最近障碍物距离的第二位数据,按BCD编码,最大值为9;DC0表示第三位数据,0表示0,1表示5。
2.3.2 防扒车模式
防扒车模式下,输出的数据包也包括3个字节,但只有第一个字节为有效数据,后两个字节无效,固定为‘0x00’。该数据包第一字节的数据格式如图6所示,高四位为起始标志,用于说明此报警数据是倒车模式下的数据还是防扒车模式下的数据,倒车模式是“0101”,扒车模式是“1010”。低四位指示方位,SX位为1则表示X号探头检测到近距离障碍物,SX为0则表示没有检测到近距离障碍物。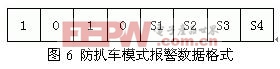


评论