
基于GPS/GPRS技术的CAN总线工程车辆远程监测系统
1 系统整体结构
本文提出的CAN总线工程车辆远程监测系统,通过车载电子控制装置ECU的CAN总线获取车辆运行信息,并利用GPRS无线网络通信手段对车辆进行远程监控及调度管理。
工程车辆远程监测系统的体系结构主要由控制中心和车载移动终端组成。车载终端设备通过CAN总线接口模块获取车辆实时运行参数信息,合并GPS定位信息后将这些信息通过GPRS将数据发送至监控中心,控制中心将接收到的数据进行解析,并且在屏幕上实时地显示每个车辆的具体位置以及其它参量信息。同时控制中心根据各车辆具体情况下传相应的控制指令,对车辆进行远程实时控制。

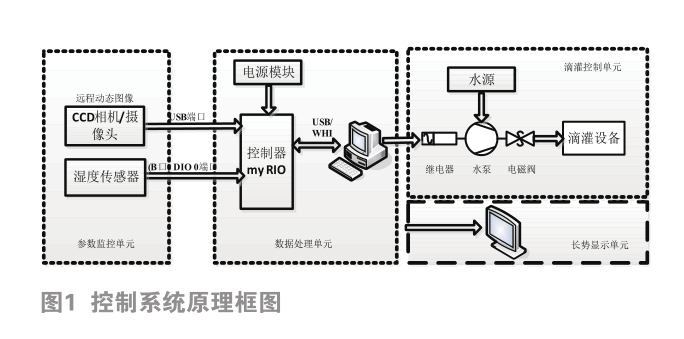
系统以C8051F040为核心模块,结合GPS模块、GPRS通讯模块、CAN总线模块、存储模块以及电源模块等实现对工程车辆运行过程状态的监控、显示、记录和报警,系统结构框图如图2所示。

本系统选用新华龙公司的C8051F040单片机作为核心控制单元,该芯片具有与MCS-51完全兼容的指令内核,采用流水线处理技术,提高了指令执行效率;集成JTAG,支持在线编程;采用低电压供电(2.7~3.6 V),因为工程车辆车载电源为24V,必须经过电源转换模块才能转换为系统各模块所需的电压。具备多种总线接口,两个UART口可实现全双工通信,通信波特率可分别设定,可分别用于GPS信号的接收和GPRS通讯交互。
此外,它内部集成的CAN控制器,符合CAN2.0B协议,带有32个消息对象,每个消息对象有独立的地址,可以配置为发送或接收数据,工作位速率可达1Mpbs。CAN总线控制器用于和工程车辆的ECU通讯,获取车辆的实时运行数据和故障数据。可见,选用该芯片可充分应用已有的功能,大大简化系统外围电路的设计。
2.2 GPS定位模块
工程车辆远程监测系统采用GS-87作为GPS模块,它是一个高效能、低功耗的智能型卫星接收模块。GS-87工作电压为3.3V,可以直接与单片机连接进行串口通讯;GS-87遵循NMEA_0183标准,定位精度可达10m以内,可以满足对车辆的定位要求。单片机通过串口与GS-87相连,通过编程对GPS接收到的信息进行处理,提取出用户所需的信息与监控中心通信以及存入外扩存储器模块。

tcp/ip相关文章:tcp/ip是什么











评论