
基于CAN总线的掘进机悬臂控制系统
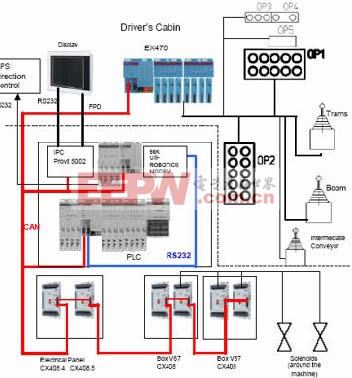
该系统采用基于贝加莱2003系列PCC作为主控制单元,完成电气系统各单元的启、停以及与生产过程相关联的各种逻辑的集中控制。摒弃传统的继电器,实现了电动机的过热、过流、过载、缺相以及36V、220V漏电和主回路漏电闭锁等保护。电子保护电路通过电流互感器对回路的实时监控,能够准确地判断相关回路的运行状态,并及时将结果反馈到主控单元PCC中,从而实现相应的电气动作。
另外,该系统还选用了贝加莱PowerPanel作为系统状态显示设备。它通过中文界面向用户显示系统的运行和故障状态,使用户能够及时地了解系统情况,并能够根据显示提供的信息快速地处理系统故障。


评论