
前照灯技术状况的检测

Ex=(E2-E1)/2
其中,E1= I1 R1,E2= R2 I2。当I1=I2时,有Ex=0。当光电池1的受光量大于光电池2时,有I1>I2,电路输出Ex<0;反之则有Ex>0。

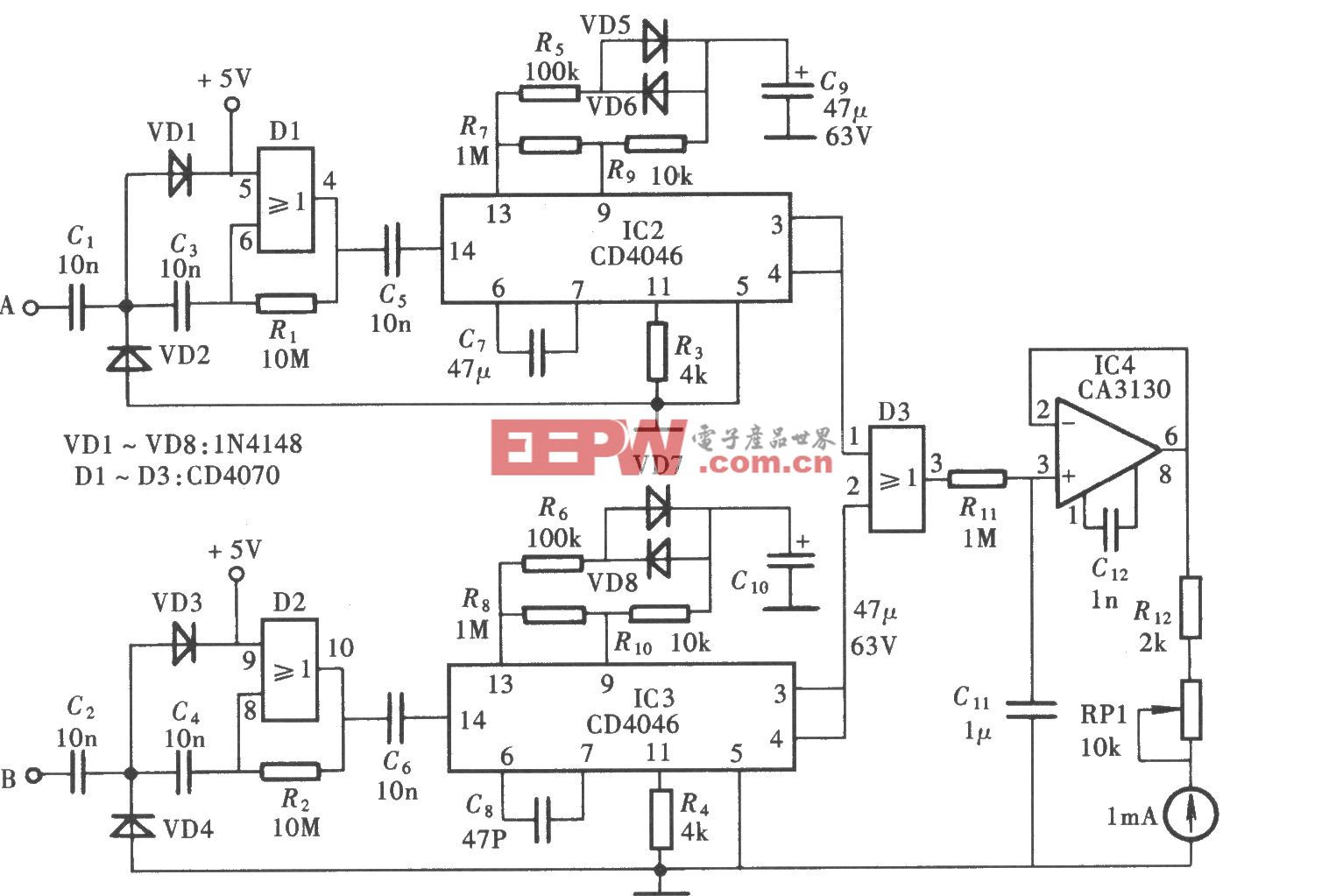
电机转向控制电路集装在一块电路板上。由光电池检测电路产生的误差信号Ex经过T型滤波电路滤除5OHz的干扰信号后,被送入前置放大器。放大后的偏差信号再经过状态比较器确定Ex>0,Ex0或Ex=0的三种状态控制状态输出电路,产生电机正转信号和电机反转信号,或者不产生信号输出(即电机停转)。
电路配有零位调整和增益调节两个电位器,是仪器传动系统定位精度的重要环节。零位漂移直接影响定位精度,而增益过小会降低仪器的检测灵敏度,导致零点误差增大,但增益过高会使仪器的稳定度降低,产生振荡。

如图 9所示,放大器和三状态比较器构成透镜电机的转向控制电路,IN.ADJ为放大器的零位调整电位器,GAIN为比较器的增益调节电位器。在测定条件下,继电器J8导通,其常开触点J8.1和J8.2将光电池Pu和PD的信号接入放大器,并用电位器BAL调节其平衡点。在校准时(校准灯发光强度20000cd),置光轴角为0°,调节BAL使相应的光轴角指示计读数为零。在工作时,如果PU和PD的信号不平衡,透镜电机被驱动,位移传感器检测位移量送光轴角指示计电路,使指示计的指针发生偏转,直到PU和PD达到新的平衡,此时指示计的读数即为前照灯光轴的偏斜量。
退出测定时,J8释放,其常闭触点J8.1和J8.2分别接通电位器ZERO和位移传感器,如果此时透镜不在原点,它们就会产生使透镜返回原点的信号,驱动透镜电机作相应的转动。

检测仪使用同一组光电池测量前照灯的发光强度和光轴角。所以光电池信号除了送往光轴角测量电路外,还送给加法电路进行信号叠加,以产生发光强度的信号。
发光强度信号和光轴角信号同时被送到各自的指示计电路,去驱动指示计指针的偏转,每个指示计电路都配有调节电位器,用来调节电路的增益、放大器的零点和校准指示电表的刻度值。为了便于计算机处理,这些信号还被作为采样信号输出,通过连接电缆与计算机连接。
为了便于手动调整操作及校准等,仪器还配有相关的继电器控制电路、操作开关与按钮。
为了适应仪器快速移向检测位置,或从检测位置上返回,所以仪器底箱的移动(即整机左右移动)采用交流可逆齿轮减速伺服电动机,并采用快速制动装置,该制动装置能保证在测定状态下受光器稳定不动。交流调速电路使得在非测定条件下电机高速运行,而在测定条件下电机以低速运行,并准确稳定地使仪器对准前照灯的主光轴。



评论