
设计高性能和低功耗的电机控制系统
数字电机控制的首次推出旨在克服传统模拟系统在处理漂移、组件老化和由温度引起的变化等方面的挑战。灵活的软件算法不仅消除了与组件有关的容差问题,还使开发者能够动态地适应环境条件随着时间的变化。例如,使用数字化实施现在不仅能够完全打开或关闭风扇电机,还能根据系统温度调整风扇速度。此外,系统还能够自行校准,从而不需要安排常规的手动维护。
本文概述了电机控制设计方面的事项,例如多个电机控制、磁场定向控制、功率因数校正和传感器控制。此外还介绍了当今的微控制器(MCU)如何使各种广泛的应用具有更大精度、更小功耗和更低成本。
当今的微控制器(MCU)可使各种广泛的应用具有更大精度、更小功耗和更低成本,包括:
● 带有风机和压缩机的白色家电和设备,例如洗衣机和冰箱
● HVAC(取暖、通风和空调)系统
● 用于电机控制、电源逆变器和机器人的工业伺服驱动
● 汽车控制系统,包括动力转向、防锁死刹车和悬架控制
TI了解开发者在设计这些高性能电机控制系统时面临的挑战。制造商寻求引入先进的控制算法以实现产品差异化,而日益增加的政府法规要求更高效的功耗和减少EMI。
为了帮助开发人员应对这些多种多样的挑战,TI提供了TMS320C2000 Piccolo MCU系列。Piccolo MCU具有优化的架构,集成了专用外设,能够:
● 使用实时算法获得更精确的控制
● 通过功率因数校正(PFC)获得更高的功效和更好的控制
● 支持通过单芯片控制多个电机
● 通过无传感器控制简化设计
● 降低系统复杂性和成本
Piccolo的优点Piccolo MCU利用TI的高性能TMS320C28x内核,提供以单一独立控制器控制系统所需的所有性能和外设。通过充足的余量和专用外设,Piccolo MCU使开发者能够实现更先进的控制算法,在进一步提高性能的同时降低系统成本。
Piccolo架构已针对数字控制应用进行了优化,具有先进的架构特性,增强了高速信号处理能力。Piccolo的主CPU内核具有单周期32×32位乘法及累积单元等内置DSP功能,大幅度提高了计算速度。此外,诸如ADC和PWM等控制外设设计得非常灵活,能够轻松适应几乎任何用途,而需要的软件开销极小。例如,模数转换器所具有的自动序列发生器允许开发者进行编程,以循环通过特定次序的样本,这样当应用程序需要时值已就绪。使用更智能的控制外设和强大的CPU内核,控制环路运行更紧密,既改进了控制算法的动态特性,又减少了干扰行为。
TMS320F2803x和F2806x Piccolo MCU上集成的控制律加速器(CLA)是一个32位浮点数学加速器,它能有效承载主CPU内核的高速控制环路。CLA在不经过CPU内核的前提下通过对外设的直接访问和响应外设中断的能力实现此过程。与独立内核相似,CLA有自己的指令集和内存空间,可以完全独立于CPU进行操作。
其他重要的Piccolo MCU特性包括:
● 3.3-V单电源支持全部功能的运行
● 双内部高精度振荡器;无需外部晶体
● 12位A/D转换器具有16通道,最大采样频率为每秒4.6兆样本
● 多达19通道的PWM输出,具有可配置自动死区
● 19个PWM通道中有多达8个可以在高分辨率模式下工作,其可以低至150皮秒
● 增强型正交编码器脉冲(QEP)和增强型捕捉外设(eCAP)可以简化传感器解码
精确和准确控制
Piccolo架构提供极佳的处理功能,达每秒4000至8000万条指令(MIPS)。这样的高性能使开发者不仅能够同时监视和控制多个电机,还能够执行更复杂的控制算法以实现更高的精度、更流畅的性能和更低的功耗。例如,单一Piccolo MCU能够在控制两个电机的同时维持有源PFC控制,并且仍然有足够的处理能力来执行高级电机控制算法,例如无传感器的磁场定向控制(FOC)。
脉宽调制(PWM)在产生供应给电机或高性能电源的电压或电流中发挥重要的作用。控制算法的最新改进使开发人员能够实施高度精确的算法,以提供与系统行为实时变化相适应的动态控制。FOC具有很多优势,包括低速的全电机扭矩功能、出色的动态行为、跨越很大速度范围的高效率、对扭矩和磁通的解耦控制、短期过载功能和四象限操作。但是,FOC也要求比标准的控制方案明显更加复杂的计算。
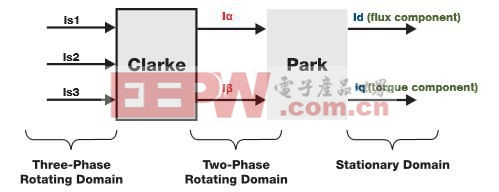
图1.如果组合Clarke和Park变换(如上述定义),我们可从三相旋转域移至固定域:仅需实时控制DC数量。
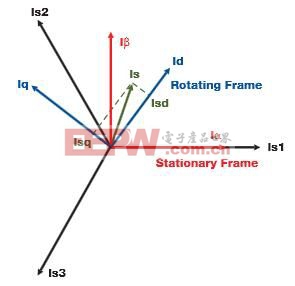
图2.定子电流矢量去耦为扭矩和通量分量,以执行磁场定向控制。
FOC原理是通过对电机的相电流进行采样来控制定子磁场的角度和振幅分量,然后进行转换,使其易于控制。电机的三相电流通过ADC读入系统。这些相电流处于三相旋转域内,并使用Clarke变换将其转换为二维旋转域。由此,可使用Park变换将这两个相位转换到固定域内,如图1所示。Clarke和Park变换可被可视化为彼此的矢量投影,如图2所示。Park变换会产生通量分量Id和转矩分量Iq。永磁电机的电机转矩仅取决于转矩分量Iq。因此,最便捷的控制策略即是将通量分量(Id)设置为零,这将最大限度地减少转矩电流比并提高电机效率。电流分量的控制需要具备有关瞬时转子位置的知识。转子位置既可使用无传感器技术计算,也可使用传感器测量。由于Park变换的输出位于固定域中,因此可使用PID回路等传统技术进行控制。然后可将PID回路的输出输入到逆向Park、逆向Clarke中,然后直接输入到电机驱动器。
图3所示为完整的FOC电机控制系统,该系统使用无传感器技术以获取转子位置。三相逆变器的ADCINx和ADCINy输出是三个相电流之二;第三种很容易计算。如上所述,相电流从此处输入Parke和Clarke变换中。此无传感器系统根据三相电流的反馈使用“SMOPOS”和“SMOSPD”计算转子位置,消除了使用昂贵传感器的需求。
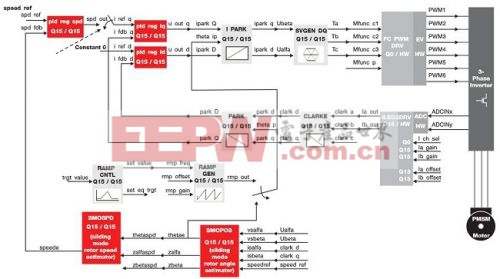
图3.适用于永磁电机的完整磁场定向控制系统。





评论