
MEMS和FOG的精确导航之争
光纤陀螺仪(FOG)以前曾经是环形激光陀螺仪(RLG)等其他技术的低成本替代品,现在该技术面临着新的竞争。微机电系统(MEMS)陀螺仪开始抢夺传统FOG应用的市场份额。具体来说,天线阵列稳定、农业机械控制、常规车辆导航成为MEMS和FOG对峙的战场。
为了确定用于导航应用的这两种技术之间的相似点,我们将对选定的高端MEMS陀螺仪与低端FOG陀螺仪进行比较。我们在分析中使用了导航软件和测试案例作为控制,以确定MEMS是否真正为在战术导航性能水平上使用做好了准备。
MEMS用于精确导航
过去几年中,MEMS在导航行业日益受到青睐,因为它提供了经过改进的误差特性和环境稳定性,以及更多的带宽和更出色的g灵敏度,而且嵌入式运算能力的应用日益广泛,可以运行高级融合和传感器误差建模算法。
新的精密惯性导航系统(INS)市场正在形成气候,MEMS技术也在进入以往被FOG技术主导的市场。从FOG到MEMS技术的一个明显转变是天线阵列稳定应用。
机器控制应用也可以得益于MEMS技术的进步。以前,用户偏好价格30,000美元以上的FOG或RLG导航系统,因为其精确度和可靠性比具有代表性的1,000美元MEMS导航系统高出20倍。低成本MEMS导航系统的改进使很多应用极大受益,精密农业和UGV/UAV/USV便是其中两个典型的例子。
实时导航硬件
本例中使用的导航系统的设计目的是为电机提供高速率的高度输出,然后该电机再让车辆顶棚上的天线阵列达到稳定。天线阵列的用途是维持与地球同步卫星之间的通信。
该导航系统用作束带式INS/GNSS导航器,提供高速率的位置和速度数据。惯性测量单元(IMU)数据以1,000Hz频率流向导航滤波器,这些数据包用于预测位置、速度和高度解决方案。从双天线获取的GNSS位置、速度和航向用作对导航滤波器的更新。当GNSS不可用时,则使用磁力计来帮助初始化航向。使用气压计来帮助确定高度。
特殊校准程序与导航滤波器并行发生。这些程序校准磁力计、双天线安装对准误差、IMU安装对准误差,还校准车辆振动水平以便进行静态期检测。
该系统可在两种硬件配置中工作。第一种配置包括两个FOG(检测航向角和俯仰角)、一个MEMS陀螺仪(检测横滚)、三轴MEMS加速度计、三轴MEMS磁力计、MEMS气压计,传感器硬件的总物料成本(BOM)为大约8,000美元(小批量售价)。
第二种配置包含三个MEMS陀螺仪(用于检测所有方位角),以及与前一种配置相同的三轴MEMS加速度计、三轴MEMS磁力计和MEMS气压计,总成本为大约1,000美元(小批量售价)。这些系统的价格可能随着市场条件和售量而波动,但通常而言,FOG的价格比MEMS高出八至十倍。
为此设计选择的MEMS陀螺仪和加速度计具有在同一价位中非常出色的偏置稳定度、正交性、g灵敏度和带宽。这种系统的主要限制是带宽要求高。很多MEMS加速度计提供高带宽,但MEMS陀螺仪通常仅有100Hz或更低的带宽。
对于普通车辆导航,这一点还不会产生影响,但此系统是针对需要适应高速率控制的应用设计的。此外还有几种MEMS陀螺仪提供良好的偏置稳定度,但带宽降低或噪声很高。为本系统选择的MEMS陀螺仪在带宽和性能之间达到了平衡。表1给出了所选MEMS的实际规格。
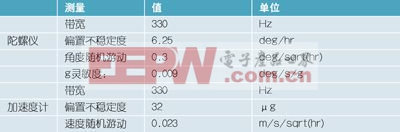
表1:所选MEMS的实际规格。
惯性MEMS的采用率处于上升态势。因此,人们为发展该技术进行了大量投资。
本系统中使用的MEMS陀螺仪采用多核架构,该架构在稳定度、噪声、线性度和线性g性能之间达到了优化平衡。完全差分四谐振器与片内高性能信号调理密切配合,从而使得谐振器的必需响应范围最小,位于高度线性区,并且提供高度的振动抑制。
由于MEMS陀螺仪和加速度计集成到多轴IMU中(请参见图1),传感器的x/y/z正交性可能成为主要误差源。主要误差源往往由跨轴灵敏度或对准误差指定。常见规格是±2%跨轴灵敏度。本系统的IMU具有0.087%的跨轴灵敏度(0.05°正交性)。更重要的是,由于器件特定的校准在出厂前完成,此规格在温度范围内有效。
对于特定旋转速率,例如在偏航轴上,正交轴的速率输出等于跨轴轴灵敏度乘以偏航率(Cross Axis Sensitivity * Yaw Rate),即使横滚轴和俯仰轴上的实际旋转为零。2%的跨轴误差通常会导致除了本有的陀螺仪噪声之外,还会增加一个数量级的轴外噪声;而此处IMU的0.087%灵敏度与本有的陀螺仪噪声水平达到精确平衡。
加速度计相关文章:加速度计原理







评论