
基于闭环MEMS的电容式惯性传感器设计
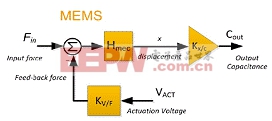
图1:MEMS惯性传感器传感部分模型但是在像Σ-Δ环路中那样的动态电压激励情况下,上述表达式不能精确地表示Vp的实际值。在基于Σ-Δ的传感器中,MEMS用作环路滤波器,会形成一个二阶电子-机械式Σ-Δ系统。
将MEMS引入Σ-Δ环路可以提高阶数,并进一步抑制量化噪声。图2显示了基于Σ-Δ的传感器框图,其中的MEMS与特殊应用集成电路(ASIC)连接在一起组成了一个完整的传感器。这个系统还集成了一个额外的Hcomp块,用于补偿环路并保持其稳定性。
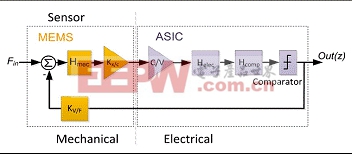
图2:基于Σ-Δ的闭环传感器框图
这种闭环传感器的系统级设计将确定各个MEMS和ASIC参数的最优值,比如刚度(k)、间隙距离(X0)、阻尼系数(D)、激励电压(VACT)和ASIC噪声。为了确保Σ-Δ环路的稳定工作,传感器的输入信号不能超过反馈信号。因此激励电压值VACT定义了给定MEMS参数集条件下允许的最大输入信号。然而,为了允许大的输入信号范围而产生大的VACT会导致功耗加大,而且有时要求采用特殊的ASIC技术才能允许高压工作。ASIC技术的选择将影响到传感器的总体成本。更重要的是,VACT允许的最大值受MEMS吸合电压Vp的限制。
MEMS间隙距离(X0)是系统能否实现低噪声工作的一个关键参数。减小X0会产生更高的Cd和Kx/c,并因此增加MEMS前向增益(灵敏度)。高灵敏度可以减少ASIC噪声对以传感器输入为参考的噪声的影响。另一方面,MEMS的布朗噪声功率直接正比于阻尼系数(D)。总的传感器噪声由MEMS噪声和ASIC噪声组成。可以根据传感器总体目标性能、MEMS灵敏度和阻尼系数估计最大可容忍的ASIC噪声值。应该注意的是,可以达到的最小X0受MEMS技术的限制。X0值对最大输入范围的影响,取决于激励电压(VACT)是否受限于MEMS的吸合电压。如果VACT受吸合电压的限制,那么减小X0将导致允许的最大输入信号范围减小。如果VACT不受吸合电压的限制,那么X0的减小和激励电容(Ca)及KV/F的改进可形成更高的反馈力,最终形成更大的输入范围。
MEMS单元的刚度(k)是一个重要的系统设计参数,因为它可以在MEMS单元中得到很好的控制,不像X0,其最小值受MEMS技术的限制。假设ASIC噪声主导传感器噪声,那么可实现的最大动态范围(VACT设为吸合之前的最大允许值)将独立于一阶k值。这是因为增加k不仅会降低MEMS灵敏度,增加以传感器输入为参考的ASIC噪声,而且也会使反馈力增加同样的数量,因为这种方法允许在更高的VACT时工作。在MEMS噪声主导传感器性能的情况下,应增加k值,以便支持更大的动态范围。而在工作不受吸合限制的情况下,最好是减小k值,从而提高MEMS灵敏度,减小ASIC噪声对传感器噪声的影响。需要注意的是,k值会改变MEMS单元的谐振频率。在开环传感器中,谐振频率设定了传感器带宽的上限,而对闭环系统来说不是这样。因此k值可以根据动态范围和噪声要求进行设置。
传感器性能对MEMS和ASIC参数的高度依赖性表明,闭环传感器的系统级设计需要做大量的折衷考虑,其中的ASIC噪声预算、激励电压、功耗和技术都高度依赖于MEMS参数。因此为了实现最优的传感器,强烈推荐基于传感器总体目标规格的ASIC与MEMS协同设计方法,而不是针对已经设计好的MEM再进行ASIC设计。
电容传感器相关文章:电容传感器原理









评论