
基于DELMIA/IGRIP的工业机器人仿真
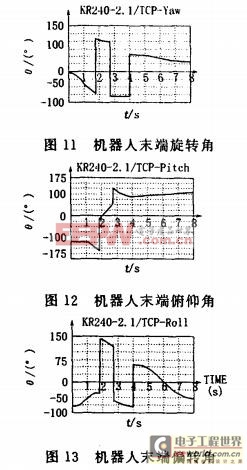
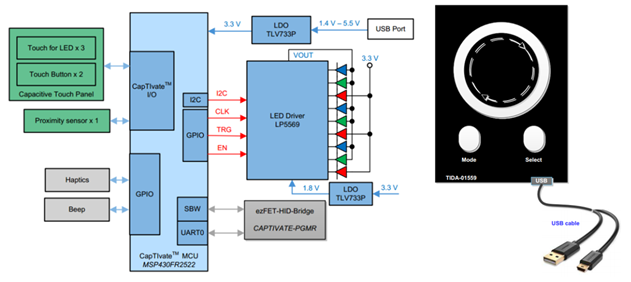
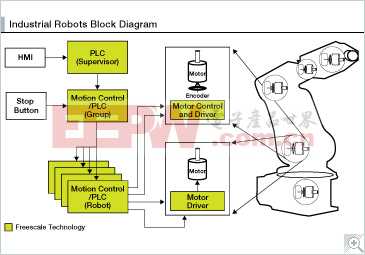
从DELMIA/IGRIP对工业机器人的仿真分析来看,我们很清楚地得到机器人关节空间的轨迹、机器人末端的空间轨迹及其姿态,并且利用DEL—MIA/IGRIP能避免机器人的碰撞。
3结束语
机器人的运动仿真是机器人技术的一个重要组成部分,机器人仿真也是机器人离线编程系统中十分重要的一环。应用DELMIA/IGRIP软件的建模仿真模块,成功解决了机器人在工作过程中无法直接观察空间运动状况的难题,是直观方便地进行机器人仿真的有益尝试。
参考文献:
[1]北京赛四达科技有限公司.DELMIA公司及虚拟制造解决方案[z].2003.
[2]朱世强.王宣银.机器人技术及其应用[M].杭州:浙江大学出版社,2600. 水位传感器相关文章:水位传感器原理









评论