
基于VB的计算机与软起动器的通讯
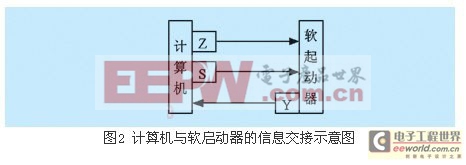
(1) 快速操作指令
快速操作是控制中最常用的操作,是控制软起动器正常运行的,包括起动、停止、故障复位、修改参数等。
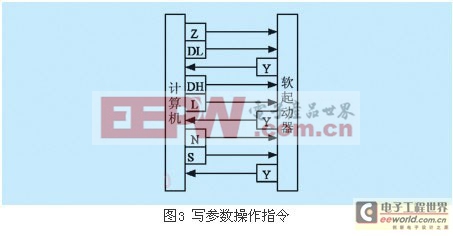
(2) 写参数操作指令
写参数操作是pc机向软起动器发送的修改参数指令,它可以修改软起动器的所有参数,包括起动时间,起动初始电压,起动方式等等,其通讯过程如图3所示。
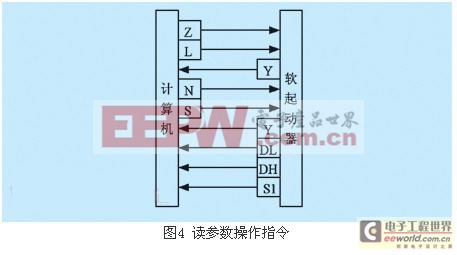
(3) 读参数操作指令
pc机执行读参数操作, 可以向软起动器读取所有的运行参数、参数表、及当前状态,其通讯过程如图4所示。
3.3 通讯指令
对应3种通讯过程,有3种通讯指令:快速指令、写指令、读指令。
(1) 快速指令
共2字节,从机接到指令后,可以立即执行。响应速度快,准确度高。结构如表1所示。

3.4 strc软起动器的通讯设置
使用软起动器时,应对软起动器的通讯地址波特率进行设置。从机地址范围为0~31,由软起动器上的拨码开关设置。波特率由参数p00设置。当多台软起动器连接在同一网络上时,要保证每台软起动器的地址不同。










评论