
一种无人飞行器温度巡检装置设计
本文引用地址:http://www.amcfsurvey.com/article/235203.htm
4.软件设计
温度巡检装置的软件以VHDL语言为基础,采样模块化的设计思路编程,分为液晶显示模块、AD采样模块、键盘输入模块、报警模块和PWM控制模块模块。图4给出了各模块之间的关系图。
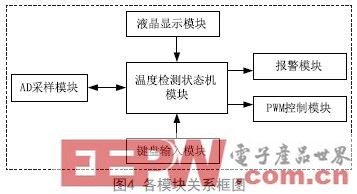
系统首先通过AD采样模块对温度进行采样,将采样的数据送入温度检测模块进行处理。温度检测模块的任务是计算将采样来的温度值与系统的预设值之间的差值,利用差值的大小来控制PWM模块输出脉冲宽度不同的脉冲波,通过脉冲波开控制继电器的通断,从而达到温度的恒定控制。
5.实测结果
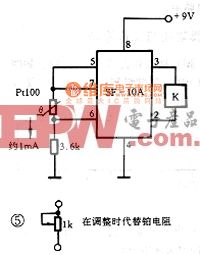
5.1 系统的定标
首先用高精度电阻箱代替铂电阻传感器Pt100对测量系统进行定标。根据式1所示的铂电阻传感器Pt100电阻和输出电压之间的关系,通过改变电阻箱的取值来设定相对应的测试温度点标称值,经过测量系统、A/D采样的计算,得到测量温度显示值。根据初测数据对测量电路、补偿电压进行校准后,完成对系统的定标工作。
5.2 系统实测
将铂电阻传感器Pt100接入测量系统,并置入高精度恒温箱中(温控精度0.01℃)进行整个温度测量系统定标测量。测量时要注意恒温箱的密封,以提高环境温度稳定性;恒温箱温度稳定后,每隔1min对同一温度点进行20次测量。由表1中数据可见,测量系统的最大误差为0.009℃,说明Pt100铂电阻传感器的定标误差较小,精度也较高,能满足高精度温度测量系统的测量要求,但温度高端误差较大,可能与恒温箱温度控制精度有关,有待于进一步定标。

6.结论
本文提出了基于FPGA的无人飞行器温度巡检装置的设计方案,该方案中所设计的无人飞行器温度巡检装置利用FPGA快速性、可并行性、延时固定性等特点,能够快速,准确的检测无人机的各部件温度。通过实验验证,系统的最大误差不超过0.01度,完全满足无人飞行器对温度采集的要求。
蜂鸣器相关文章:蜂鸣器原理








评论