
电动汽车快速充电机监控终端的设计
随着国家对新能源技术的大力扶持,电动汽车逐渐成为国家在新能源汽车产业大力发展的对象,而电动汽车充电站、快速充电机是电动汽车大规模化后不可或缺的服务基础设施之一。大量分布于各住宅小区、停车场的电动汽车用非车载智能快速充电机,实现高效、安全、智能化的管理必定成为主流。针对目前快速充电机群实行无人值守的运行情况,这就要求快速充电机须具有较高的可靠性和自动化程度,功能更加完善,可远程维护等功能。
本文引用地址:http://www.amcfsurvey.com/article/227071.htm这样,使得分布式、模块化、智能化成为快速充电机的发展方向,而高性能、低成本的充电机监控终端是其中的关键技术。为管理区域多台充电机的资源优化利用与管理的智能化,监控终端与Internet网的交互成为一种必然。
1 监控网络的整体方案
如图1的充电机的监控网络结构图所示,监控终端作为充电机与监控中心之间的一个重要网关。其有效的通信链路有:监控中心-监控终端;监控终端-充电机(或电池管理系统(BMS)、电动汽车等)。
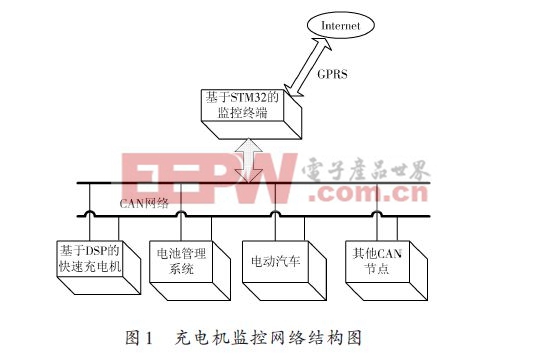
通过监控终端作为媒介,实现了监控中心与充电机及电动汽车的通信链路的建立。终端通过CAN网络与充电机、BMS及电动汽车等相互通信,采集相关节点的数据信息并存储,并将相关信息反馈给充电机。充电机根据相关信息从而实现电动汽车电池的智能充电。终端与监控中心之间是通过GPRS连接通信,终端将充电机、电池、电动汽车等相关数据传回监控中心,监控中心实现对充电机的远程控制和实时监控功能,记录充电机的运行及故障情况。车主可以由监控中心查询了解当前空闲的充电机位置,实现资源充分利用。
2 监控终端功能模块
2.1 监控终端的总体设计
监控终端是连接监控中心与充电机的桥梁。其总体设计结构如图2所示,监控终端主要由Cortex-M3 内核的STM32ZGT6 的核心模块、数据采集模块(CAN 网络)、用户计费交互信息模块、数据存储模块、实时时钟模块和GPRS通信模块6个部分所组成。终端采用Co-tex-M3内核的STM32ZGT6微处理器芯片。该单片机具有丰富的片上硬件资源,内含CAN 2.0B的控制器,以及多达4 个串口,满足终端CAN 与GPRS 网络接口的需求。
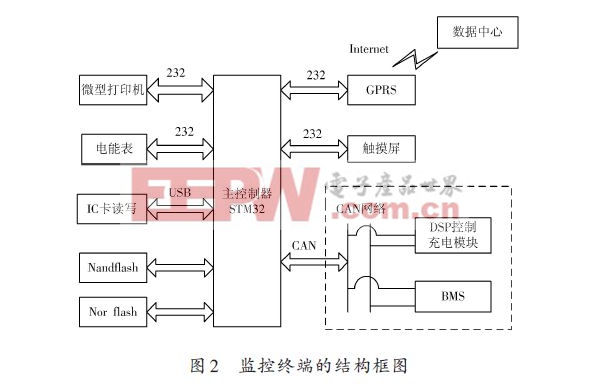
监控终端的工作流程如下:用户计费模块读取用户信息以及选择充电模式,通过CAN 网络向充电模块发送相应充电命令;同时监控终端读取CAN 网络中的关键数据帧如充电机的运行状况等,并将数据保存于NandFlash中。
定时将当前充电用户信息和充电机等运行参数通过GPRS 发送到监控中心。监控终端可以根据用户的需要,打印用户的余额或收费凭据等。
2.2 CAN总线模块
为了更好地保证CAN 总线可靠的传输,系统定义了一套通用的应用层的CAN 总线协议。主要针对CAN 2.0B协议的报文ID进行了分配及定义。
如表1 所示。

(1)优先级确定。CAN协议规定报文ID越小,其报文的优先级越高。在竞争总线时,优先级高的报文优先发送,优先级低的退出总线竞争。CAN 总线竞争的算法效率很高,是一种非破坏性竞争[3].因CAN协议规定标识符由高至低,前7位不能全为显性位。所以优先级1111b保留,故系统具有15级优先级别。
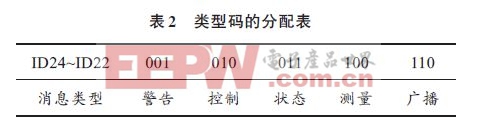
(2)类型码。协议将ID24~ID22 规定消息的类型。
在本系统中,用到的消息类型主要有:控制、状态、测量、警告和广播5 种类型。根据将类型码的具体分配如表2所示。
(3)源地址。协议规定ID12~ID16 为源地址,ID17~ID21为目标地址,进而标识报文的各接收节点与发送节点。5位地址位,保留11111b为广播地址,可以确定31个控制节点,可满足电动汽车充电机的监控需求。在此系统中,定义00000b为监控终端,00001b为充电机节点,00010b为电池管理系统(BMS)节点。
(4)分段码。因不同的节点所发送的数据量不同,可能会出现一个数据帧不能把从底层采集到的数据一次性发送完毕(即超过8 个字节的情况)。协议中将ID11~ID4定义为分段码,如表











评论